

och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
k<br />
✲<br />
+<br />
✻<br />
−<br />
ek<br />
❣ ✲<br />
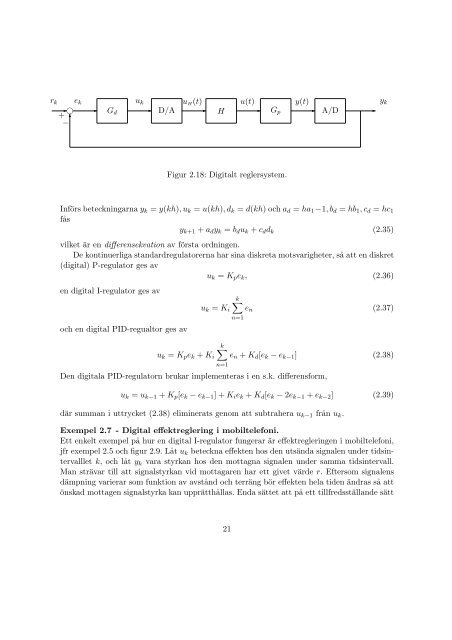
Gd<br />
uk uH(t) ✲ D/A ✲<br />
H<br />
u(t)<br />
✲<br />
Gp<br />
Figur 2.18: Digitalt reglersystem.<br />
y(t)<br />
✲<br />
Införs beteckningarna yk = y(kh), uk = u(kh), dk = d(kh) <strong>och</strong> ad = ha1−1, bd = hb1, cd = hc1<br />
f˚as<br />
(2.35)<br />
yk+1 + adyk = bduk + cddk<br />
vilket är en differensekvation av första ordningen.<br />
De kontinuerliga standardregulatorerna har sina diskreta motsvarigheter, s˚a att en diskret<br />
(digital) P-regulator ges av<br />
uk = Kpek, (2.36)<br />
en digital I-regulator ges av<br />
<strong>och</strong> en digital PID-regualtor ges av<br />
k<br />
uk = Ki en<br />
n=1<br />
k<br />
uk = Kpek + Ki<br />
n=1<br />
A/D<br />
✲<br />
yk<br />
(2.37)<br />
en + Kd[ek − ek−1] (2.38)<br />
Den digitala PID-regulatorn brukar implementeras i en s.k. differensform,<br />
uk = uk−1 + Kp[ek − ek−1] + Kiek + Kd[ek − 2ek−1 + ek−2] (2.39)<br />
där summan i uttrycket (2.38) eliminerats genom att subtrahera uk−1 fr˚an uk.<br />
Exempel 2.7 - Digital effektreglering i mobiltelefoni.<br />
Ett enkelt exempel p˚a hur en digital I-regulator fungerar är effektregleringen i mobiltelefoni,<br />
jfr exempel 2.5 <strong>och</strong> figur 2.9. L˚at uk beteckna effekten hos den utsända signalen under tidsintervalllet<br />
k, <strong>och</strong> l˚at yk vara styrkan hos den mottagna signalen under samma tidsintervall.<br />
Man strävar till att signalstyrkan vid mottagaren har ett givet värde r. Eftersom signalens<br />
dämpning varierar som funktion av avst˚and <strong>och</strong> terräng bör effekten hela tiden ändras s˚a att<br />
önskad mottagen signalstyrka kan upprätth˚allas. Enda sättet att p˚a ett tillfredsställande sätt<br />
21














