

och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Gf ✛<br />
❄<br />
+<br />
✲ ❡ e ✲<br />
❄❡ u<br />
y<br />
Gc<br />
✲ ✲ Gp<br />
✲<br />
− ✻<br />
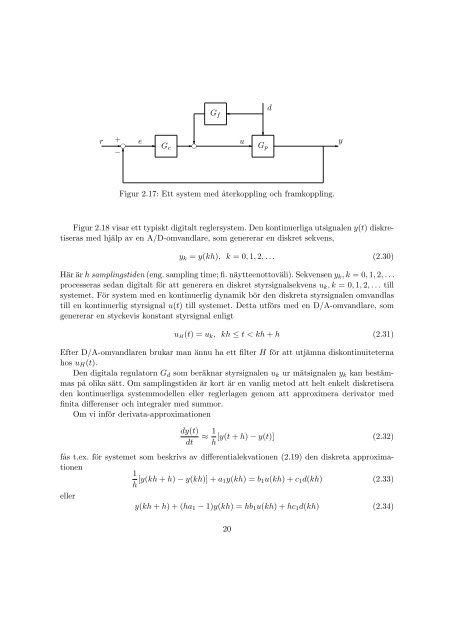
Figur 2.17: Ett system med ˚aterkoppling <strong>och</strong> framkoppling.<br />
Figur 2.18 visar ett typiskt digitalt reglersystem. Den kontinuerliga utsignalen y(t) diskretiseras<br />
med hjälp av en A/D-omvandlare, som genererar en diskret sekvens,<br />
d<br />
yk = y(kh), k = 0, 1, 2, . . . (2.30)<br />
Här är h samplingstiden (eng. sampling time; fi. näytteenottoväli). Sekvensen yk, k = 0, 1, 2, . . .<br />
processeras sedan digitalt för att generera en diskret styrsignalsekvens uk, k = 0, 1, 2, . . . till<br />
systemet. För system med en kontinuerlig dynamik bör den diskreta styrsignalen omvandlas<br />
till en kontinuerlig styrsignal u(t) till systemet. Detta utförs med en D/A-omvandlare, som<br />
genererar en styckevis konstant styrsignal enligt<br />
u H(t) = uk, kh ≤ t < kh + h (2.31)<br />
Efter D/A-omvandlaren brukar man ännu ha ett filter H för att utjämna diskontinuiteterna<br />
hos uH(t).<br />
Den digitala regulatorn Gd som beräknar styrsignalen uk ur mätsignalen yk kan bestämmas<br />
p˚a olika sätt. Om samplingstiden är kort är en vanlig metod att helt enkelt diskretisera<br />
den kontinuerliga systemmodellen eller reglerlagen genom att approximera derivator med<br />
finita differenser <strong>och</strong> integraler med summor.<br />
Om vi inför derivata-approximationen<br />
dy(t)<br />
dt<br />
1<br />
≈ [y(t + h) − y(t)] (2.32)<br />
h<br />
f˚as t.ex. för systemet som beskrivs av differentialekvationen (2.19) den diskreta approximationen<br />
1<br />
h [y(kh + h) − y(kh)] + a1y(kh) = b1u(kh) + c1d(kh) (2.33)<br />
eller<br />
y(kh + h) + (ha1 − 1)y(kh) = hb1u(kh) + hc1d(kh) (2.34)<br />
20














