УДК 621.3.01Б.И. КУЗНЕЦОВ, д-р техн. наук, проф., зав. отделом, НТЦ МТОНАН Украины, ХарьковА.В. ВОЛОШКО, аспирант, НТЦ МТО НАН Украины, ХарьковИ.В. БОВДУЙ, аспирант, НТЦ МТО НАН Украины, ХарьковЕ.В. ВИНИЧЕНКО, аспирант, НТЦ МТО НАН Украины, ХарьковСИНТЕЗ РОБАСТНОГО УПРАВЛЕНИЯ СИНХРОННЫМИПРИВОДАМИ ПРОКАТНЫХ СТАНОВ С УЧЕТОМ ИХВЗАИМОСВЯЗИ ЧЕРЕЗ ПРОКАТЫВАЕМЫЙ МЕТАЛЛРозроблено метод робастного управління синхронними головними приводамипрокатних станів з урахуванням нелінійних моментів тертя між валками тавзаємним впливом прокатних валків один на одного у ході прокатки черезметал, що прокатується. Наведено приклад динамічних характеристик синтезованоїсистеми.Разработан метод робастного управления синхронными главными приводамипрокатных станов с учетом нелинейных моментов трения между валками взаимнымвлиянием прокатных валков друг на друга в ходе прокатки через прокатываемыйметалл. Приведен пример динамических характеристик синтезированнойсистемы.Введение. Подавляющее большинство главных приводов вновьстроящихся и реконструируемых прокатных станов комплектуютсясинхронными двигателями с частотными преобразователями [1-7]. Вчастности, на главных приводах Алчевского металлургического комбинатаустановлены синхронные приводы переменного тока. Многие зарубежныефирмы при модернизации прокатных станов также выполняютзамену двигателей постоянного тока на двигатели переменного тока.Постановка проблемы, связь с научными и практическимизадачами. Динамические нагрузки в главных линиях прокатных становопасны не только величиной амплитуд, а в основном тем, что моментымогут проходить через нулевые значения с раскрыванием зазоровприводной линии и большими ударами и нагрузками [8-9]. Напрокатных станах с индивидуальными приводами коэффициенты динамичностиверхней и нижней приводных линий различны: в менеежесткой верхней линии коэффициент динамичности больше, чем внижней. Крутящие моменты в шпинделях, как правило, распределяютсянеравномерно вследствие разности скоростей вращения валков,ISSN 2079-3944. Вісник НТУ "ХПІ". <strong>2010</strong>. № <strong>55</strong>50
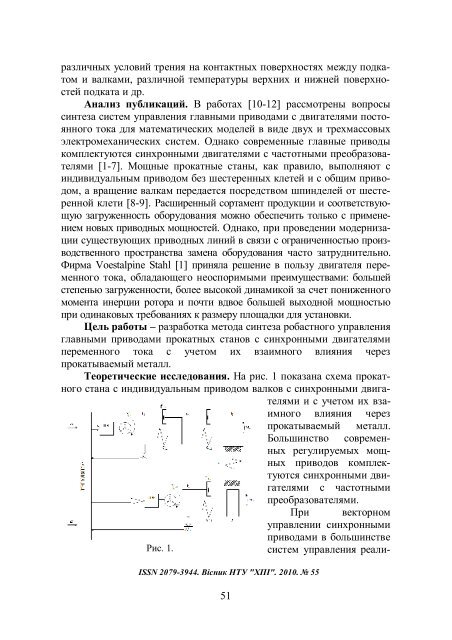
различных условий трения на контактных поверхностях между подкатоми валками, различной температуры верхних и нижней поверхностейподката и др.Анализ публикаций. В работах [10-12] рассмотрены вопросысинтеза систем управления главными приводами с двигателями постоянноготока для математических моделей в виде двух и трехмассовыхэлектромеханических систем. Однако современные главные приводыкомплектуются синхронными двигателями с частотными преобразователями[1-7]. Мощные прокатные станы, как правило, выполняют синдивидуальным приводом без шестеренных клетей и с общим приводом,а вращение валкам передается посредством шпинделей от шестереннойклети [8-9]. Расширенный сортамент продукции и соответствующуюзагруженность оборудования можно обеспечить только с применениемновых приводных мощностей. Однако, при проведении модернизациисуществующих приводных линий в связи с ограниченностью производственногопространства замена оборудования часто затруднительно.Фирма Voestalpine Stahl [1] приняла решение в пользу двигателя переменноготока, обладающего неоспоримыми преимуществами: большейстепенью загруженности, более высокой динамикой за счет пониженногомомента инерции ротора и почти вдвое большей выходной мощностьюпри одинаковых требованиях к размеру площадки для установки.Цель работы – разработка метода синтеза робастного управленияглавными приводами прокатных станов с синхронными двигателямипеременного тока с учетом их взаимного влияния черезпрокатываемый металл.Теоретические исследования. На рис. 1 показана схема прокатногостана с индивидуальным приводом валков с синхронными двигателямии с учетом их взаимноговлияния черезпрокатываемый металл.Большинство современныхрегулируемых мощныхприводов комплектуютсясинхронными двигателямис частотнымипреобразователями.При векторномуправлении синхроннымиприводами в большинствеРис. 1.систем управления реали-ISSN 2079-3944. Вісник НТУ "ХПІ". <strong>2010</strong>. № <strong>55</strong>51
- Page 1 and 2: ВЕСТНИКНАЦИОНАЛЬН
- Page 3 and 4: УДК 621.313.2В.А. ВЛАСЕН
- Page 5 and 6: абвРис. 1.гM, Гн0.0180.015
- Page 7 and 8: пар полюсів на фазу
- Page 9 and 10: УДК 621.3Л.П. ГАЛАЙКО,
- Page 11 and 12: Рис.2.Рис.3.Рис.4.Рис.5
- Page 13 and 14: УДК 621.317.4А.В. ГЕТЬМА
- Page 15 and 16: Для каждого из 14 да
- Page 17 and 18: На основе данных та
- Page 19 and 20: УДК 621.316.9Є.В. ГОНЧАР
- Page 21 and 22: льна напруга буде д
- Page 23 and 24: УДК 622. 276.6А.Г. ГУРИН,
- Page 25 and 26: закупоривания илис
- Page 27 and 28: гдеkсв =dLЭ( x); x - изме
- Page 29 and 30: ISSN 2079-3944. Вісник НТУ
- Page 31 and 32: nnm(x)ϕ&&( t)+ m(x)∑(x)T&&i ( t)
- Page 33 and 34: нижнее полупростра
- Page 35 and 36: в 4 раза меньшую сто
- Page 37 and 38: Пути решения пробл
- Page 39 and 40: УДК 621.313.2А.Е. КОЗОРЕ
- Page 41 and 42: Φ 3 = Φ4+ 2⋅g1; (4)Φ 4 = Φ6+
- Page 43 and 44: Козорезов Олександ
- Page 45 and 46: ной нагрузке, К; τ o -
- Page 47 and 48: ной; w kj - веса связи
- Page 49: Выводы. Представле
- Page 53 and 54: Для длинной линии г
- Page 55 and 56: dx(t)r r r= AX ( t)+ B1W1(t)+ B2U(
- Page 57 and 58: ⎡−2T TA γ B B − B B ⎤H∞=
- Page 59 and 60: Выводы и перспекти
- Page 61 and 62: УДК 624.04: 621.313.04: 534.1В.
- Page 63 and 64: v -0b 1Pmх, х(t)Fc 11c 212Рис.
- Page 65 and 66: v(t)IIx(t)tIt Іt І +t ІІРис.
- Page 67 and 68: тов. Численный расч
- Page 69 and 70: учитывать при эксп
- Page 71 and 72: УДК 621.316:532.232А.Н. МОР
- Page 73 and 74: ментов использовал
- Page 75 and 76: Дж/(м 3·с).Экспериме
- Page 77 and 78: Таблица 1 - Испытате
- Page 79 and 80: а б вРис. 1.обследов
- Page 81 and 82: (2000 - 530)/(2000 - 10) = 1470/199
- Page 83 and 84: либо кабеля отрази
- Page 85 and 86: тящимся ротором ба
- Page 87 and 88: Как видно на рис. 2 и
- Page 89 and 90: УДК 621.318.3И.А. НЕСТЕР
- Page 91 and 92: USF =пU , (2)πρ0( 1+ α тθ)( D
- Page 93 and 94: Экономические пока
- Page 95 and 96: аРис.4.бРезультаты
- Page 97 and 98: вых функцийP min ,*m min
- Page 99 and 100: результаты разрабо
- Page 101 and 102:
считались авария а
- Page 103 and 104:
= S 0 (t) exp(b1∙tgδ1+ b2∙Δ t
- Page 105 and 106:
контролю, и решение
- Page 107 and 108:
УДК 621.313В.І. ТКАЧУК,
- Page 109 and 110:
конструктивний вуз
- Page 111 and 112:
Рис. 4.За критерій о
- Page 113 and 114:
Біляковський Ігор
- Page 115 and 116:
де, двойной АВР на в
- Page 117 and 118:
АВР. Каждое из таки
- Page 119 and 120:
занный недостаток
- Page 121 and 122:
УДК 621.313М.В. ЧЕРНЯВС
- Page 123 and 124:
Q∆1 πγ11,22n1 v = K1Kобр1fv1
- Page 125 and 126:
Список літератури:
- Page 127 and 128:
ки, гибридных систе
- Page 129 and 130:
УДК 621.039.624В.Б. ЮФЕРО
- Page 131 and 132:
дит при движении пр
- Page 133 and 134:
сложности возможно
- Page 135 and 136:
ее нарастания ω* = ω
- Page 137 and 138:
∆ ωciωci≤ ∆ H H . (7)Сле
- Page 139 and 140:
Рис. 7.Из формул вид
- Page 141 and 142:
сильных магнитных
- Page 143 and 144:
с отверстием для на
- Page 145 and 146:
Производительност
- Page 147 and 148:
12001000XeB,Oe800600Kr400200Ar00 20
- Page 149 and 150:
лотронных колебани
- Page 151 and 152:
Gurin A.G., Mostovoj S.P., Pidashov
- Page 153 and 154:
ility on breaking strength of its p
- Page 155 and 156:
prises are shown in view of their p
- Page 157 and 158:
УДК ... (10 pt)Б.І. КУЗНЕ
- Page 159 and 160:
Фото авторів (2,5×3 с
- Page 161 and 162:
Набока Б.Г., Беспроз