Bericht_Nr.385_P.OltmannK ... - TUHH
Bericht_Nr.385_P.OltmannK ... - TUHH
Bericht_Nr.385_P.OltmannK ... - TUHH

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
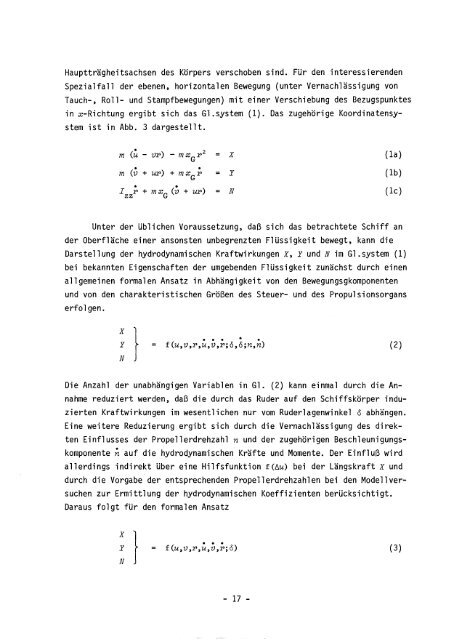
Hauptträgheitsachsen des Körpers verschoben sind. Für den interessierenden<br />
Spezialfall der ebenen, horizontalen Bewegung (unter Vernachlässigung von<br />
Tauch-, Roll- und Stampfbewegungen) mit einer Verschiebung des Bezugspunktes<br />
in x-Richtung ergibt sich das Gl.system (1). Das zugehörige Koordinatensy-<br />
stem ist in Abb. 3 dargestellt.<br />
. m (u - vr) - mxGr2 = x (la)<br />
. .<br />
m (v + ur) + m xG r = Y (lb)<br />
I ;. + mX G (v + ur) = N (lc)<br />
zz<br />
Unter der üblichen Voraussetzung, daß sich das betrachtete Schiff an<br />
der Oberfläche einer ansonsten unbegrenzten Flüssigkeit bewegt, kann die<br />
Darstellung der hydrodynamischen Kraftwirkungen x, Y und N im Gl.system (1)<br />
bei bekannten Eigenschaften der umgebenden Flüssigkeit zunächst durch einen<br />
allgemeinen formalen Ansatz in Abhängigkeit von den Bewegungsgkomponenten<br />
und von den charakteristischen Größen des Steuer- und des Propulsionsorgans<br />
erfolgen.<br />
. .. . .<br />
= f(u,v,r,u,v,r;o,o;n,n)<br />
Die Anzahl der unabhängigen Variablen in Gl. (2) kann einmal durch die An-<br />
nahme reduziert werden, daß die durch das Ruder auf den Schiffskörper indu-<br />
zierten Kraftwirkungen im wesentlichen nur vom Ruderlagenwinkel 0 abhängen.<br />
Eine weitere Reduzierung ergibt sich durch die Vernachlässigung des direk-<br />
ten Einflusses der Propellerdrehzahl n und der zugehörigen Beschleunigungs-<br />
komponente ~ auf die hydrodynamischen Kräfte und Momente. Der Einfluß wird<br />
allerdings indirekt über eine Hilfsfunktion f(~u) bei der Längskraft X und<br />
durch die Vorgabe der entsprechenden Propellerdrehzahlen bei den Modellver-<br />
suchen zur Ermittlung der hydrodynamischen Koeffizienten berücksichtigt.<br />
Daraus folgt für den formalen Ansatz<br />
~ }<br />
f(u,v,r,~,v,;';o) (3)<br />
- 17 -<br />
(2)