

Der UMC 0.18 Design Flow am Beispiel eines PDA ... - Mpc.belwue.de
Der UMC 0.18 Design Flow am Beispiel eines PDA ... - Mpc.belwue.de
Der UMC 0.18 Design Flow am Beispiel eines PDA ... - Mpc.belwue.de

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Dimensionierung und Entwurfszentrierung analoger Schaltungen mit WiCkeD<br />
Tab. 4: Performance und Spezifikation <strong>de</strong>s OPV<br />
Performance<br />
Spezifikation<br />
Verstärkung A<br />
0 > 75 dB<br />
Stromaufnahme I<br />
DD<br />
< 1 mA<br />
Transitfrequenz f<br />
T<br />
> 140 MHz<br />
Phasenreserve ϕ<br />
R<br />
> 60°<br />
Thermic Noise N<br />
th < 25 nV/ Hz<br />
Settling Time CM ST<br />
cm < 40 ns<br />
Settling Time DM ST<br />
dm < 40 ns<br />
CM-Fehler (Max) E<br />
max < 40 mV<br />
CM-Fehler (Min) E<br />
min<br />
> -40 mV<br />
CM-Fehler (static) E > | ± 1 mV |<br />
Uomax<br />
Uomin<br />
Uon<br />
Uop<br />
U<br />
stat<br />
o, max<br />
U<br />
o, min<br />
U<br />
on<br />
U<br />
op<br />
> 2,7 V<br />
< 600 mV<br />
< 600 mV<br />
> 2,7 V<br />
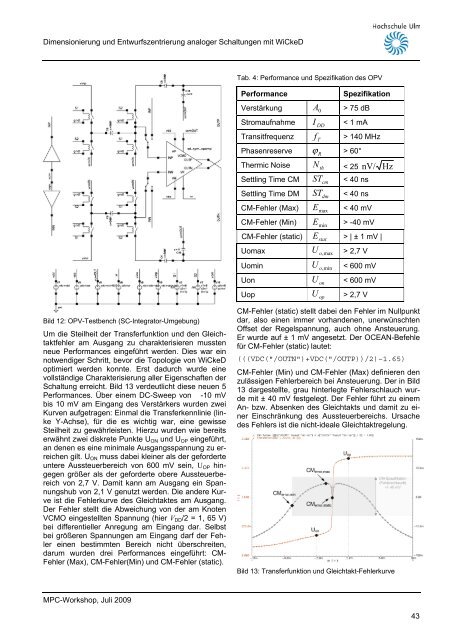
Bild 12: OPV-Testbench (SC-Integrator-Umgebung)<br />
Um die Steilheit <strong>de</strong>r Transferfunktion und <strong>de</strong>n Gleichtaktfehler<br />
<strong>am</strong> Ausgang zu charakterisieren mussten<br />
neue Performances eingeführt wer<strong>de</strong>n. Dies war ein<br />
notwendiger Schritt, bevor die Topologie von WiCkeD<br />
optimiert wer<strong>de</strong>n konnte. Erst dadurch wur<strong>de</strong> eine<br />
vollständige Charakterisierung aller Eigenschaften <strong>de</strong>r<br />
Schaltung erreicht. Bild 13 ver<strong>de</strong>utlicht diese neuen 5<br />
Performances. Über einem DC-Sweep von -10 mV<br />
bis 10 mV <strong>am</strong> Eingang <strong>de</strong>s Verstärkers wur<strong>de</strong>n zwei<br />
Kurven aufgetragen: Einmal die Transferkennlinie (linke<br />
Y-Achse), für die es wichtig war, eine gewisse<br />
Steilheit zu gewährleisten. Hierzu wur<strong>de</strong>n wie bereits<br />
erwähnt zwei diskrete Punkte U ON und U OP eingeführt,<br />
an <strong>de</strong>nen es eine minimale Ausgangsspannung zu erreichen<br />
gilt. U ON muss dabei kleiner als <strong>de</strong>r gefor<strong>de</strong>rte<br />
untere Aussteuerbereich von 600 mV sein, U OP hingegen<br />
größer als <strong>de</strong>r gefor<strong>de</strong>rte obere Aussteuerbereich<br />
von 2,7 V. D<strong>am</strong>it kann <strong>am</strong> Ausgang ein Spannungshub<br />
von 2,1 V genutzt wer<strong>de</strong>n. Die an<strong>de</strong>re Kurve<br />
ist die Fehlerkurve <strong>de</strong>s Gleichtaktes <strong>am</strong> Ausgang.<br />
<strong>Der</strong> Fehler stellt die Abweichung von <strong>de</strong>r <strong>am</strong> Knoten<br />
VCMO eingestellten Spannung (hier V DD /2 = 1, 65 V)<br />
bei differentieller Anregung <strong>am</strong> Eingang dar. Selbst<br />
bei größeren Spannungen <strong>am</strong> Eingang darf <strong>de</strong>r Fehler<br />
einen bestimmten Bereich nicht überschreiten,<br />
darum wur<strong>de</strong>n drei Performances eingeführt: CM-<br />
Fehler (Max), CM-Fehler(Min) und CM-Fehler (static).<br />
CM-Fehler (static) stellt dabei <strong>de</strong>n Fehler im Nullpunkt<br />
dar, also einen immer vorhan<strong>de</strong>nen, unerwünschten<br />
Offset <strong>de</strong>r Regelspannung, auch ohne Ansteuerung.<br />
Er wur<strong>de</strong> auf ± 1 mV angesetzt. <strong>Der</strong> OCEAN-Befehle<br />
für CM-Fehler (static) lautet:<br />
(((VDC("/OUTN")+VDC("/OUTP))/2)–1.65)<br />
CM-Fehler (Min) und CM-Fehler (Max) <strong>de</strong>finieren <strong>de</strong>n<br />
zulässigen Fehlerbereich bei Ansteuerung. <strong>Der</strong> in Bild<br />
13 dargestellte, grau hinterlegte Fehlerschlauch wur<strong>de</strong><br />
mit ± 40 mV festgelegt. <strong>Der</strong> Fehler führt zu einem<br />
An- bzw. Absenken <strong>de</strong>s Gleichtakts und d<strong>am</strong>it zu einer<br />
Einschränkung <strong>de</strong>s Aussteuerbereichs. Ursache<br />
<strong>de</strong>s Fehlers ist die nicht-i<strong>de</strong>ale Gleichtaktregelung.<br />
Bild 13: Transferfunktion und Gleichtakt-Fehlerkurve<br />
MPC-Workshop, Juli 2009<br />
43


![[Geben Sie hier die Überschrift ein] - MPC](https://img.yumpu.com/8654082/1/188x260/geben-sie-hier-die-uberschrift-ein-mpc.jpg?quality=85)




