

antriebstechnik 3/2018
antriebstechnik 3/2018
antriebstechnik 3/2018
- TAGS
- antriebstechnik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
LINEARTECHNIK<br />
systems aufgrund ihrer Nichtlinearität. Um den Forderungen moderner<br />
Produktionsanlagen gerecht zu werden, ist eine Reduzierung<br />
der Umkehrspanne notwendig. Durch das Verspannen zweier<br />
parallel angeordneter Ritzel kann die Umkehrspanne im Antriebsstrang<br />
eliminiert werden. Die Literatur nennt verschiedene mechanische<br />
und elektrische Ansätze zur Erzeugung der Verspannung<br />
[1–3, 6–9]. Der Einfluss der Verspannung auf die Umkehrspanne,<br />
die Reibung sowie die statische und dynamische Steifigkeit wurde<br />
bereits eingehend betrachtet [10] und wird in diesem Artikel nicht<br />
weiter vertieft.<br />
In den folgenden Kapiteln wird aufgezeigt, welche Positioniergenauigkeiten<br />
und Steifigkeitseigenschaften mit einem einzelnen<br />
ZRA der Firma Wittenstein Alpha GmbH erreicht werden können.<br />
Zudem werden Maßnahmen zur Verbesserung der Positioniergenauigkeit<br />
genannt und experimentell validiert. Des Weiteren<br />
wird ein Vergleich zum elektrisch verspannten ZRA vorgenommen<br />
und ein Ausblick auf aktuelle Forschungsarbeiten zur Anpassung<br />
der Verspannung während des Betriebs und zur Steigerung der<br />
Bahngenauigkeit gegeben.<br />
Versuchsaufbau<br />
Die in diesem Artikel vorgestellten Untersuchungen wurden an<br />
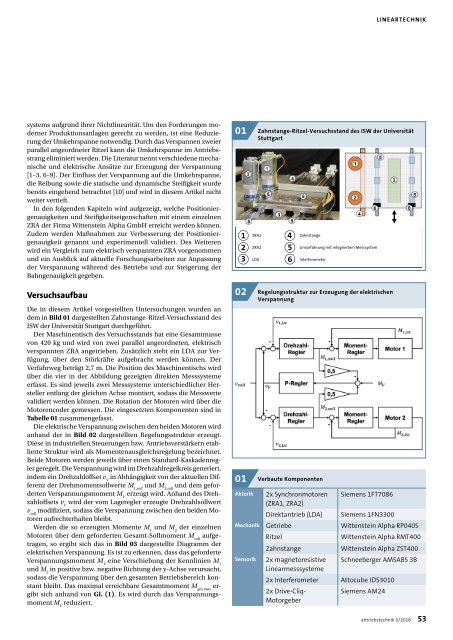
dem in Bild 01 dargestellten Zahnstange-Ritzel-Versuchsstand des<br />
ISW der Universität Stuttgart durchgeführt.<br />
Der Maschinentisch des Versuchsstands hat eine Gesamtmasse<br />
von 420 kg und wird von zwei parallel angeordneten, elektrisch<br />
verspannten ZRA angetrieben. Zusätzlich steht ein LDA zur Verfügung,<br />
über den Störkräfte aufgebracht werden können. Der<br />
Verfahrweg beträgt 2,7 m. Die Position des Maschinentischs wird<br />
über die vier in der Abbildung gezeigten direkten Messsysteme<br />
erfasst. Es sind jeweils zwei Messsysteme unterschiedlicher Hersteller<br />
entlang der gleichen Achse montiert, sodass die Messwerte<br />
validiert werden können. Die Rotation der Motoren wird über die<br />
Motorencoder gemessen. Die eingesetzten Komponenten sind in<br />
Tabelle 01 zusammengefasst.<br />
Die elektrische Verspannung zwischen den beiden Motoren wird<br />
anhand der in Bild 02 dargestellten Regelungsstruktur erzeugt.<br />
Diese in industriellen Steuerungen bzw. Antriebsverstärkern etablierte<br />
Struktur wird als Momentenausgleichsregelung bezeichnet.<br />
Beide Motoren werden jeweils über einen Standard-Kaskadenregler<br />
geregelt. Die Verspannung wird im Drehzahlregelkreis generiert,<br />
indem ein Drehzahloffset v V<br />
in Abhängigkeit von der aktuellen Differenz<br />
der Drehmomentsollwerte M 1,soll<br />
und M 2,soll<br />
und dem geforderten<br />
Verspannungsmoment M V<br />
erzeugt wird. Anhand des Drehzahloffsets<br />
v V<br />
wird der vom Lageregler erzeugte Drehzahlsollwert<br />
v soll<br />
modifiziert, sodass die Verspannung zwischen den beiden Motoren<br />
aufrechterhalten bleibt.<br />
Werden die so erzeugten Momente M 1<br />
und M 2<br />
der einzelnen<br />
Motoren über dem geforderten Gesamt-Sollmoment M soll<br />
aufgetragen,<br />
so ergibt sich das in Bild 03 dargestellte Diagramm der<br />
elektrischen Verspannung. Es ist zu erkennen, dass das geforderte<br />
Verspannungsmoment M V<br />
eine Verschiebung der Kennlinien M 1<br />
und M 2<br />
in positive bzw. negative Richtung der y-Achse verursacht,<br />
sodass die Verspannung über den gesamten Betriebsbereich konstant<br />
bleibt. Das maximal erreichbare Gesamtmoment M ges,max<br />
ergibt<br />
sich anhand von Gl. (1). Es wird durch das Verspannungsmoment<br />
M V<br />
reduziert.<br />
01<br />
1<br />
2<br />
3<br />
02<br />
01<br />
2<br />
1<br />
6<br />
4<br />
3<br />
5 5<br />
ZRA1<br />
ZRA2<br />
LDA<br />
Zahnstange-Ritzel-Versuchsstand des ISW der Universität<br />
Stuttgart<br />
4<br />
5<br />
6<br />
6<br />
Zahnstange<br />
Linearführung mit integriertem Messsystem<br />
Interferometer<br />
1<br />
2<br />
4<br />
5<br />
3<br />
6 6<br />
Regelungsstruktur zur Erzeugung der elektrischen<br />
Verspannung<br />
Verbaute Komponenten<br />
Aktorik 2x Synchronmotoren Siemens 1FT7086<br />
(ZRA1, ZRA2)<br />
Direktantrieb (LDA) Siemens 1FN3300<br />
Mechanik Getriebe Wittenstein Alpha RP040S<br />
Ritzel<br />
Wittenstein Alpha RMT400<br />
Zahnstange<br />
Wittenstein Alpha ZST400<br />
Sensorik 2x magnetoresistive Schneeberger AMSABS 3B<br />
Linearmesssysteme<br />
2x Interferometer Attocube IDS3010<br />
2x Drive-Cliq-<br />
Motor geber<br />
Siemens AM24<br />
5<br />
<strong>antriebstechnik</strong> 3/<strong>2018</strong> 53














