

antriebstechnik 3/2018
antriebstechnik 3/2018
antriebstechnik 3/2018
- TAGS
- antriebstechnik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Verformung [µm]<br />
Kraft [kN]<br />
x ZRA<br />
– x Tisch<br />
[µm]<br />
LINEARTECHNIK<br />
dynamischen Steifigkeiten. Die Eigenfrequenzen für Nachgiebigkeits-<br />
und Mechanikfrequenzgang unterscheiden sich, da es sich um<br />
verschiedene Eigenmoden bzw. Schwingungsformen des Systems<br />
handelt. Wird das System als 2-Massen-Schwinger betrachtet, beschreibt<br />
ω 0,M<br />
die Frequenz, bei der nur die angehängte Tischmasse<br />
m Tisch<br />
schwingt, während die Motorwelle nahezu stillsteht. Die Frequenz<br />
ω 0,N<br />
beschreibt den Zustand, bei dem beide Massen gegeneinander<br />
schwingen. Anhand dieser Eigenfrequenzen, der Masse<br />
und des Trägheitsmoments des Antriebssystems lassen sich die<br />
frequenz abhängigen Steifigkeiten des Systems über die Gl. (8) und<br />
(10) berechnen. Bei der Berechnung der Steifigkeiten des elektrisch<br />
verspannten ZRA muss das Trägheitsmoment J ZRA<br />
verdoppelt werden,<br />
da zwei Antriebe verbaut sind. Theoretisch müssen sich je<br />
Konfiguration (d. h. einzelner ZRA und elektrisch verspannter ZRA),<br />
unabhängig von der Belastung, die gleichen Steifigkeiten k(ω 0,N<br />
) und<br />
k(ω 0,M<br />
) ergeben.<br />
Die anhand von ω 0,M<br />
berechneten Steifigkeiten k(ω 0,M<br />
) passen in<br />
guter Näherung zusammen. Der einzelne ZRA zeigt eine geringere<br />
Steifigkeit k(ω 0,M<br />
) als der elektrisch verspannte ZRA. Dies ist plausibel,<br />
da bei der elektrischen Verspannung, wie bereits erwähnt, zwei<br />
Antriebe eingesetzt werden. Die geringen Abweichungen der Steifigkeiten<br />
k(ω 0,M<br />
) aufgrund des Gewichts lassen sich anhand der<br />
nichtlinearen Verläufe der Messkurven für die statische Steifigkeit<br />
erklären. Die für die Messung der Frequenzgänge genutzte Anregungskraft<br />
liegt im Bereich von 0 bis 2 000 N, wobei die Anregungskraft<br />
bei Messungen mit Gewicht höher ist, um die gleiche Auslenkungsamplitude<br />
der Geschwindigkeit zu erreichen. Die Steifigkeit<br />
nimmt mit anwachsender Anregungskraft zu (Abflachung der<br />
Kurve). Dies erklärt die etwas höheren Steifigkeiten für die Messungen<br />
mit Gewicht im Gegensatz zu den Messungen ohne Gewicht.<br />
Außerdem erklärt dies auch die allgemein geringeren Steifigkeiten<br />
im Vergleich zur statisch bestimmten Steifigkeit von 84,5 N/µm.<br />
Diese wurde bei deutlich höheren Kräften bestimmt, bei denen ein<br />
linearer Zusammenhang zwischen Kraftzunahme und Verformung<br />
besteht. Die anhand von ω 0,N<br />
berechneten Steifigkeiten k(ω 0,N<br />
) passen,<br />
bis auf den Ausreißer 68,8 N/µm, zu den Steifigkeiten k(ω 0,M<br />
).<br />
Zusammenfassung und Ausblick<br />
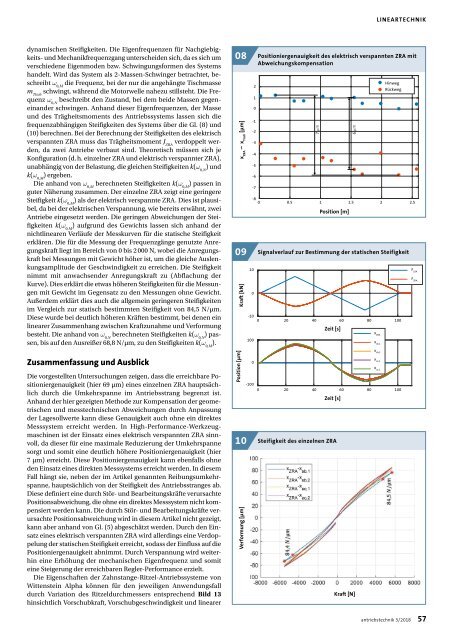
Die vorgestellten Untersuchungen zeigen, dass die erreichbare Positioniergenauigkeit<br />
(hier 69 µm) eines einzelnen ZRA hauptsächlich<br />
durch die Umkehrspanne im Antriebsstrang begrenzt ist.<br />
Anhand der hier gezeigten Methode zur Kompensation der geometrischen<br />
und messtechnischen Abweichungen durch Anpassung<br />
der Lagesollwerte kann diese Genauigkeit auch ohne ein direktes<br />
Messsystem erreicht werden. In High-Performance-Werkzeugmaschinen<br />
ist der Einsatz eines elektrisch verspannten ZRA sinnvoll,<br />
da dieser für eine maximale Reduzierung der Umkehrspanne<br />
sorgt und somit eine deutlich höhere Positioniergenauigkeit (hier<br />
7 µm) erreicht. Diese Positioniergenauigkeit kann ebenfalls ohne<br />
den Einsatz eines direkten Messsystems erreicht werden. In diesem<br />
Fall hängt sie, neben der im Artikel genannten Reibungsumkehrspanne,<br />
hauptsächlich von der Steifigkeit des Antriebsstranges ab.<br />
Diese definiert eine durch Stör- und Bearbeitungskräfte verursachte<br />
Positionsabweichung, die ohne ein direktes Messsystem nicht kompensiert<br />
werden kann. Die durch Stör- und Bearbeitungskräfte verursachte<br />
Positionsabweichung wird in diesem Artikel nicht gezeigt,<br />
kann aber anhand von Gl. (5) abgeschätzt werden. Durch den Einsatz<br />
eines elektrisch verspannten ZRA wird allerdings eine Verdoppelung<br />
der statischen Steifigkeit erreicht, sodass der Einfluss auf die<br />
Positioniergenauigkeit abnimmt. Durch Verspannung wird weiterhin<br />
eine Erhöhung der mechanischen Eigenfrequenz und somit<br />
eine Steigerung der erreichbaren Regler-Performance erzielt.<br />
Die Eigenschaften der Zahnstange-Ritzel-Antriebssysteme von<br />
Wittenstein Alpha können für den jeweiligen Anwendungsfall<br />
durch Variation des Ritzeldurchmessers entsprechend Bild 13<br />
hinsichtlich Vorschubkraft, Vorschubgeschwindigkeit und linearer<br />
08<br />
09<br />
Position [µm]<br />
10<br />
Verformung [µm]<br />
10<br />
0<br />
-10<br />
0 20 40 60 80 100<br />
100<br />
0<br />
2<br />
1<br />
0<br />
-1<br />
-2<br />
-3<br />
-4<br />
-5<br />
-6<br />
-7<br />
-8<br />
0<br />
0.5 1 1.5 2 2.5<br />
Position [m]<br />
Signalverlauf zur Bestimmung der statischen Steifigkeit<br />
Zeit [s]<br />
-100<br />
0 20 40 60 80 100<br />
100<br />
100<br />
80<br />
80<br />
60<br />
60<br />
40<br />
40<br />
20<br />
20<br />
-20<br />
-40<br />
-60<br />
-80<br />
Positioniergenauigkeit des elektrisch verspannten ZRA mit<br />
Abweichungskompensation<br />
0<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
7 µm<br />
Zeit [s]<br />
Steifigkeit des einzelnen ZRA<br />
6 µm<br />
x ZRA<br />
x sb,1<br />
x sb,2<br />
x ac,1<br />
x ac,1<br />
Hinweg<br />
Rückweg<br />
-100<br />
-8000 -6000 -4000 -2000 0 2000 4000 6000 8000<br />
Kraft [N]<br />
-100<br />
-8000<br />
-6000 -4000 -2000 0 2000 4000 6000<br />
Kraft [N]<br />
F LDA<br />
F ZRA<br />
8000<br />
<strong>antriebstechnik</strong> 3/<strong>2018</strong> 57














