Space Grant Consortium - University of Wisconsin - Green Bay
Space Grant Consortium - University of Wisconsin - Green Bay
Space Grant Consortium - University of Wisconsin - Green Bay

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
which involved dropping an increasing number <strong>of</strong> spheres modeled with rigid body frictional<br />
contacts in a box using two different multibody dynamic engines. The ‘LCP’ column denotes the<br />
program which exploits the improved formulation, while the ‘Penalty’ column uses the<br />
inefficient penalty-based method (Madsen, Pechdimaljian et al. 2007).<br />
The motivation for this research project stems from the fact that a majority <strong>of</strong> the virtual<br />
prototyping s<strong>of</strong>tware used by industry today relies on simple, brute force methods to solve rigidbody<br />
frictional contact problems. This creates a limit on the number <strong>of</strong> frictional contacts that<br />
can be simulated efficiently. High-fidelity models with many contacts, such as tracked vehicles<br />
or vibration feeders, cannot be used in the design process because even small simulations can<br />
take hours to days to complete on a state-<strong>of</strong>-the-art desktop computer. The primary goal <strong>of</strong> this<br />
project is to be able to model and simulate real-life mechanisms by leveraging this new rigidbody<br />
frictional contact formulation. Simulations are expected to take much less time, but<br />
solution accuracy must be maintained if the new method is to be useful. The mechanism <strong>of</strong><br />
choice is a tracked sub-system <strong>of</strong> a hydraulic excavator similar to the model used in a previous<br />
project (Madsen 2007). There are many rigid-body frictional contacts present in the model, and<br />
short simulations using industry grade s<strong>of</strong>tware took many hours to complete.<br />
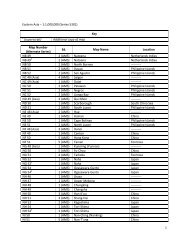
Table 1: Number <strong>of</strong> rigid spheres vs. CPU time using LCP and Penalty contact approaches<br />
Number <strong>of</strong> Max Number <strong>of</strong> LCP CPU time (seconds) Penalty CPU time (seconds)<br />
Spheres Mutual Contacts<br />
1 1 0.7 0.41<br />
2 3 0.73 3.3<br />
4 14 0.73 7.75<br />
8 44 0.76 25.36<br />
16 152 0.82 102.78<br />
32 560 1.32 644.4<br />
The second goal <strong>of</strong> this research is to determine if the improved fixed-point iterative method will<br />
yield tracked vehicle simulation results that are accurate when compared to those from<br />
previously performed simulations. Concretely, the time evolution <strong>of</strong> the displacements,<br />
velocities, and accelerations <strong>of</strong> all bodies should be similar to the values previously obtained.<br />
This demonstrates that using the new fixed-point iterative method to solve the set <strong>of</strong> LCPs that<br />
arise from modeling frictional contacts as a set <strong>of</strong> unilateral constraints yields accurate results<br />
when compared to identical simulations carried out using proven methods. Because this new<br />
method enforces contact constraints on the velocity-level, there can be a drift in these constraint<br />
equations due to numerical errors (Studer and Glocker 2005). Also, the new formulation is not<br />
proven to have unique solution, although it has been shown to converge to a single solution<br />
under most circumstances (Anitescu 2006).<br />
Procedure<br />
The first step in the project was to select an appropriate model in which to apply the new<br />
multibody dynamic formulation. A hydraulic excavator model similar to that described in<br />
(Madsen 2007) was selected because the system contains many rigid-body frictional contacts.<br />
The computational model is described, and then the modeling procedure using two different<br />
multibody dynamic engines is discussed. The inefficient penalty based formulation for contact<br />
18