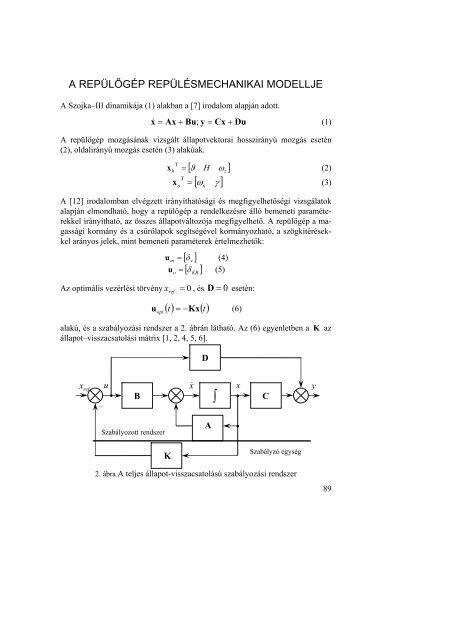
A REPÜLŐGÉP REPÜLÉSMECHANIKAI MODELLJEA Szojka–III dinamikája (1) alakban a [7] irodalom alapján adott.x & = Ax + Bu;y = Cx + Du(1)A repülőgép mozgásának vizsgált állapotvektorai hosszirányú mozgás esetén(2), oldalirányú mozgás esetén (3) alakúak.T[ ϑ ][ γ ]x h = H ω z(2)x (3)oT = ω xA [12] irodalomban elvégzett irányíthatósági és megfigyelhetőségi vizsgálatokalapján elmondható, hogy a repülőgép a rendelkezésre álló bemeneti paraméterekkelirányítható, az összes állapotváltozója megfigyelhető. A repülőgép a magasságikormány és a csűrőlapok segítségével kormányozható, a szögkitérésekkelarányos jelek, mint bemeneti paraméterek értelmezhetők:m = [ δ v ]o = [ δ KR ]u (4)u (5)Az optimális vezérlési törvény xref.= 0 , és D = 0 esetén:uopt() t −Kx( t)= (6)alakú, és a szabályozási rendszer a 2. ábrán látható. Az (6) egyenletben a K azállapot–visszacsatolási mátrix [1, 2, 4, 5, 6].Dxref–u•Bx&∫x•CySzabályozott rendszerA•KSzabályzó egység2. ábra A teljes állapot-visszacsatolású szabályozási rendszer89
A SZABÁLYOZÓ EGYSÉG ELŐZETES TERVEZÉSELQR MÓDSZERRELA pilóta nélküli repülőgépek több szabályozott bemenettel és több szabályozottkimenettel rendelkeznek, és működésük során külső és belső sztochasztikus zajokis gerjesztik. Modern szabályozástechnikában a szabályozók tervezésére sokmódszer ismert, amelyek lehetővé teszik azok előzetes tervezését. A megtervezettszabályozó lehet optimális, vagy nem optimális. Az optimális szabályozóvalműködő rendszerek, pedig lehet determinisztikusak vagy sztochasztikusak. Modern–,és posztmodern szabályozástechnikában a többváltozós szabályozásirendszerek soros kompenzátorai tervezésére az alábbi fontosabb módszerekethasználhatjuk:― a pólus áthelyezés módszere – nem optimális szabályozótervezési módszer;― LQR módszer (Linear Quadratic Regulator) – többváltozós, determinisztikusszabályozótervezési módszer;― LQG módszer (Linear Quadratic Gaussian) – többváltozós, sztochasztikuskülső és belső zajok által gerjesztett szabályozási rendszer tervezésére;― LQG/LTR módszer (Linear Quadratic Gaussian with Loop TransferRecovery) – hurokátvitel visszaállítás segítségével, a többváltozós, sztochasztikuskülső és belső zajok által gerjesztett szabályozási rendszer tervezésére;― H ∞ módszer – többváltozós szabályozási rendszerek robusztus tervezéséhez;― μ szitézis módszer – többváltozós szabályozási rendszer robusztus tervezésére,struktúrált és nemstruktúrált paraméterbizonytalanságok figyelembevételével.A Szojka–III pilóta nélküli repülőgépek robotpilótájának tervezésére az előzőekbenfelsorolt módszerek közül az LQR optimális szabályozó tervezési módszertválasztottam [13].Az LQR feladat megoldása során alkalmazott súlyozó mátrixok előzetes beállításáraaz egységnyi, azonos súlyozás elvét, vagy a reciprok négyzetes szabálytalkalmazhatjuk. Ha nem ismertek az x , és az u vektorok korlátozásai,akkor alkalmazhatjuk az egységnyi, vagy azonos súlyozás elvét. Ennek a módszerneka lényege, hogy az x állapotvektor rendezőit súlyozó Q és az u bemenetivektor rendezőit súlyozó R mátrix összes főátlón álló elemét egységnyiértékűnek választjuk [17, 18, 20].Másik lehetőség a reciprok négyzetes módszer alkalmazása, melynek lényege,hogy az egyes állapotváltozókra a tervezők biztonsági, vagy egyéb másokok, mint pl. a repülőgép manőverező képessége stb. miatt korlátozásokat vezetnekbe. Így a szabályozási rendszer x állapot-, és az u bemeneti vektorának90
- Page 1 and 2:
ZMNE REPÜLŐMŰSZAKI INTÉZETREPÜ
- Page 3 and 4:
Szerkesztette:Békési BertoldA sze
- Page 6:
HADTUDOMÁNYI ROVATRovatvezető:Rov
- Page 9:
nultak azok a repülőtiszt jelölt
- Page 13 and 14:
gusztus 5-e között a Kossuth Akad
- Page 15 and 16:
en tiszthelyettesként szolgáltak.
- Page 17 and 18:
A hadsereg gyorsított ütemű fejl
- Page 19 and 20:
nagy, Tóth Zoltán alhadnagy, Tót
- Page 21 and 22:
20Ribi Tibor alhadnagySzeltner Józ
- Page 23 and 24:
[4] IVÁN Dezső: A magyar katonai
- Page 25 and 26:
A repülőgép mennyiség a hábor
- Page 27 and 28:
A ROMÁN LÉGIERŐ SZERVEZETEIA HÚ
- Page 29 and 30:
erősödött, szükség esetén el
- Page 31 and 32:
A román légierő legfontosabb rep
- Page 34 and 35:
Dr. Hadnagy Imre JózsefREPÜLŐ HA
- Page 36 and 37:
― Tanszékvezető: Homér Imre ő
- Page 38 and 39:
minden formáját alkalmazták, a r
- Page 40 and 41: az alaptagozat — nem repülő —
- Page 42 and 43: Laczkovich Károly főhadnagy.― T
- Page 44 and 45: intézményt. Ebben az új felsőok
- Page 46 and 47: A tanévben végzett munkát jelent
- Page 48 and 49: Baran János főhadnagyKovács Bél
- Page 50 and 51: politikai foglalkozásokon nem a le
- Page 52: ossz elhelyezési körülmények k
- Page 56 and 57: Szegedi PéterA SZOJKA-III NEMIRÁN
- Page 58 and 59: 1. ábra. A Szojka-III háromnézet
- Page 60 and 61: 00v=110km/h-2-5v=130km/h-4-10v=150k
- Page 62 and 63: 0 x 104 61-0.5v=110Km/h-1H [m]-1.5-
- Page 64 and 65: 2. üzemmód: v=130 km/h, H=400 m,
- Page 66 and 67: Erõsíté s [dB]Fá zisszög [fok]
- Page 68 and 69: KÖVETKEZTETÉSEKA szerző elvégez
- Page 70 and 71: Füleky AndrásA SUGÁRHAJTÓMŰVEK
- Page 72 and 73: kiforrott dugattyús motorokkal. Je
- Page 74 and 75: Gázturbinás sugárhajtóművekkel
- Page 76 and 77: Minden vizsgálati módszer alapjá
- Page 78 and 79: Az üzembentartó a tisztítástól
- Page 80 and 81: Bármelyik fajta emisszió-komponen
- Page 82 and 83: sik lehetséges módja a gurulási
- Page 84 and 85: ságra és megbízhatóságra ford
- Page 86: MŰSZAKI TUDOMÁNYI ROVATRovatvezet
- Page 89: nőverparancsok hatásának befoly
- Page 93 and 94: t1 végJ = [T T∫ x Qx + u Ru] dt
- Page 95 and 96: ség súlyfüggvényei a repülési
- Page 97 and 98: A tranziens idők t ≅ 3secés a f
- Page 99 and 100: KKKo11o31o51===[ − 0,9452 −1,87
- Page 101 and 102: Az orsózó szögsebesség átmenet
- Page 103 and 104: alkalmazása a minőségi jellemző
- Page 105 and 106: ― AUASzP-24KP állásszög és t
- Page 107 and 108: AP-28L1 robotpilótaAz AP-28L1 robo
- Page 109 and 110: ― a felsorolt személyzet tagok k
- Page 111 and 112: ― „Rádió-magasságmérő” k
- Page 113 and 114: ― a leszálláshoz történő bej
- Page 115 and 116: Minden fél készlet vezérlése sa
- Page 117 and 118: Az 1.számú és 2.számú fél ké
- Page 119 and 120: Ipari nagyjavítás utáni állapot
- Page 121 and 122: működésű rendszert terveznek, a
- Page 123 and 124: ~Φ = sI− A =s= sn+ αn−11s( s
- Page 125 and 126: Az ábra alapján elmondható, hogy
- Page 127 and 128: KÖVETKEZTETÉSEKA vizsgálatok ere
- Page 129 and 130: számos tiszt a Szovjetunióban is
- Page 131 and 132: 130