

Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
FEI KKUI<br />
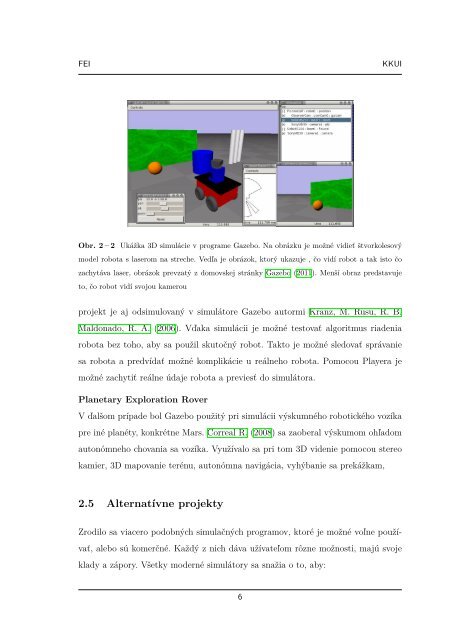
Obr. 2 – 2 Ukážka 3D simulácie v programe Gazebo. Na obrázku je možné vidieť štvorkolesový<br />
model robota s laserom na streche. Vedľa je obrázok, ktorý ukazuje , čo vidí robot a tak isto čo<br />
zachytáva laser, obrázok <strong>pre</strong>vzatý z domovskej stránky Gazebo (2011). Menší obraz <strong>pre</strong>dstavuje<br />
to, čo robot vidí svojou kamerou<br />
projekt je aj odsimulovaný v simulátore Gazebo autormi Kranz, M. Rusu, R. B.<br />
Maldonado, R. A. (2006). Vďaka simulácii je možné testovať algoritmus riadenia<br />
robota bez toho, aby sa použil skutočný robot. Takto je možné sledovať správanie<br />
sa robota a <strong>pre</strong>dvídať možné komplikácie u reálneho robota. Pomocou <strong>Player</strong>a je<br />
možné zachytiť reálne údaje robota a <strong>pre</strong>viesť do simulátora.<br />
Planetary Exploration Rover<br />
V ďalšom prípade bol Gazebo použitý pri simulácii výskumného robotického vozíka<br />
<strong>pre</strong> iné planéty, konkrétne Mars. Correal R. (2008) sa zaoberal výskumom ohľadom<br />
autonómneho chovania sa vozíka. Využívalo sa pri tom 3D videnie pomocou stereo<br />
kamier, 3D mapovanie terénu, autonómna navigácia, vyhýbanie sa <strong>pre</strong>kážkam,<br />
2.5 Alternatívne projekty<br />
Zrodilo sa viacero podobných simulačných programov, ktoré je možné voľne použí-<br />
vať, alebo sú komerčné. Každý z nich dáva užívateľom rôzne možnosti, majú svoje<br />
klady a zápory. Všetky moderné simulátory sa snažia o to, aby:<br />
6













