

Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
FEI KKUI<br />
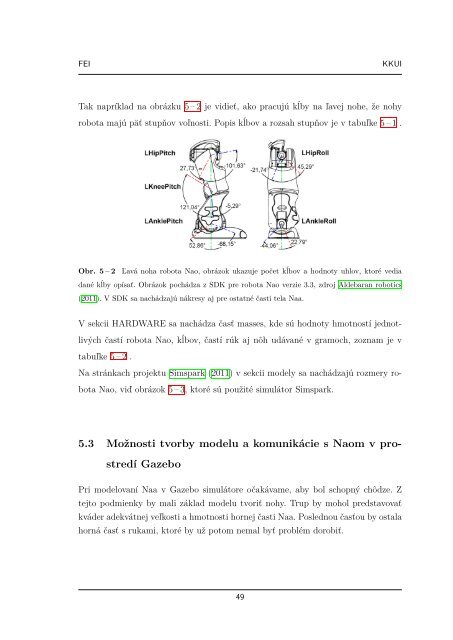
Tak napríklad na obrázku 5 – 2 je vidieť, ako pracujú kĺby na ľavej nohe, že nohy<br />
robota majú päť stupňov voľnosti. Popis kĺbov a rozsah stupňov je v tabuľke 5 – 1 .<br />
Obr. 5 – 2 Ľavá noha robota Nao, obrázok ukazuje počet kĺbov a hodnoty uhlov, ktoré vedia<br />
dané kĺby opísať. Obrázok pochádza z SDK <strong>pre</strong> robota Nao verzie 3.3, zdroj Aldebaran robotics<br />
(2011). V SDK sa nachádzajú nákresy aj <strong>pre</strong> ostatné časti tela Naa.<br />
V sekcii HARDWARE sa nachádza časť masses, kde sú hodnoty hmotností jednot-<br />
livých častí robota Nao, kĺbov, častí rúk aj nôh udávané v gramoch, zoznam je v<br />
tabuľke 5 – 2 .<br />
Na stránkach projektu Simspark (2011) v sekcii modely sa nachádzajú rozmery ro-<br />
bota Nao, viď obrázok 5 – 3, ktoré sú použité simulátor Simspark.<br />
5.3 Možnosti tvorby modelu a komunikácie s Naom v pro-<br />
stredí Gazebo<br />
Pri modelovaní Naa v Gazebo simulátore očakávame, aby bol schopný chôdze. Z<br />
tejto podmienky by mali základ modelu tvoriť nohy. Trup by mohol <strong>pre</strong>dstavovať<br />
kváder adekvátnej veľkosti a hmotnosti hornej časti Naa. Poslednou časťou by ostala<br />
horná časť s rukami, ktoré by už potom nemal byť problém dorobiť.<br />
49













