

Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
FEI KKUI<br />
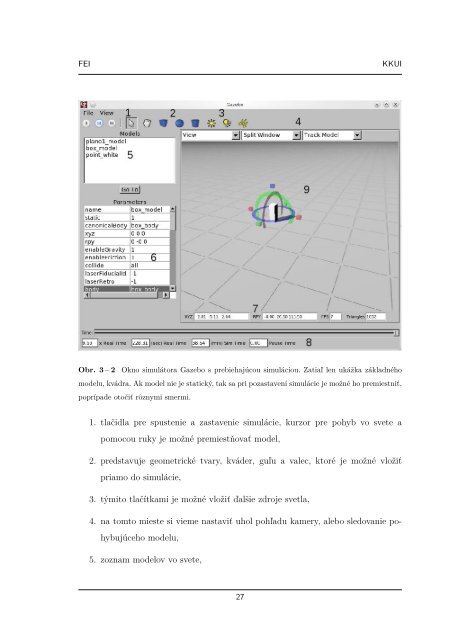
Obr. 3 – 2 Okno simulátora Gazebo s <strong>pre</strong>biehajúcou simuláciou. Zatiaľ len ukážka základného<br />
modelu, kvádra. Ak model nie je statický, tak sa pri pozastavení simulácie je možné ho <strong>pre</strong>miestniť,<br />
poprípade otočiť rôznymi smermi.<br />
1. tlačidla <strong>pre</strong> spustenie a zastavenie simulácie, kurzor <strong>pre</strong> pohyb vo svete a<br />
pomocou ruky je možné <strong>pre</strong>miestňovať model,<br />
2. <strong>pre</strong>dstavuje geometrické tvary, kváder, guľu a valec, ktoré je možné vložiť<br />
priamo do simulácie,<br />
3. týmito tlačítkami je možné vložiť ďalšie zdroje svetla,<br />
4. na tomto mieste si vieme nastaviť uhol pohľadu kamery, alebo sledovanie po-<br />
hybujúceho modelu,<br />
5. zoznam modelov vo svete,<br />
27













