

Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
FEI KKUI<br />
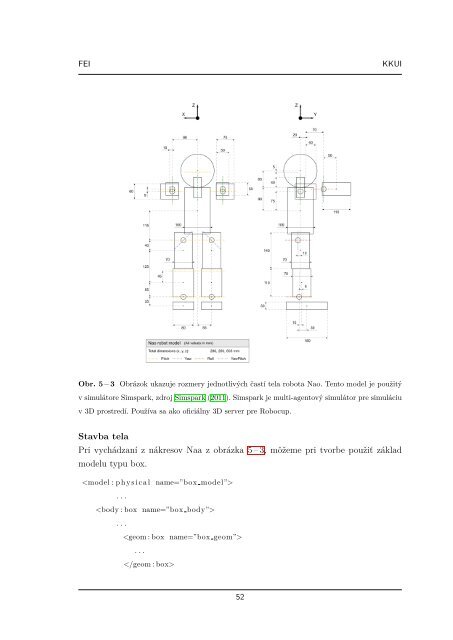
Obr. 5 – 3 Obrázok ukazuje rozmery jednotlivých častí tela robota Nao. Tento model je použitý<br />
v simulátore Simspark, zdroj Simspark (2011). Simspark je multi-agentový simulátor <strong>pre</strong> simuláciu<br />
v 3D prostredí. Používa sa ako oficiálny 3D server <strong>pre</strong> Robocup.<br />
Stavba tela<br />
Pri vychádzaní z nákresov Naa z obrázka 5 – 3, môžeme pri tvorbe použiť základ<br />
modelu typu box.<br />
<br />
. . .<br />
<br />
. . .<br />
<br />
. . .<br />
<br />
52













