

Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
FEI KKUI<br />
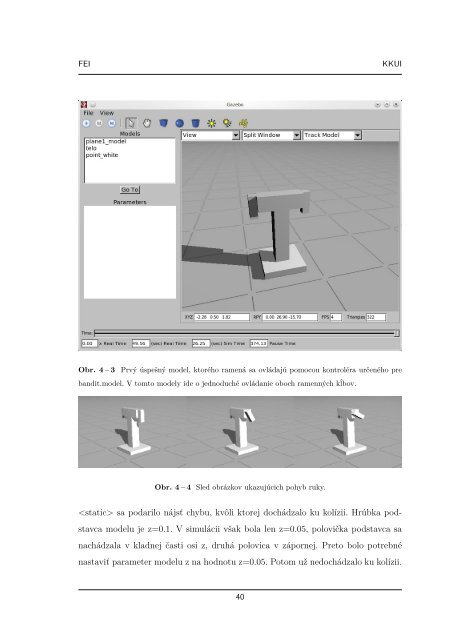
Obr. 4 – 3 Prvý úspešný model, ktorého ramená sa ovládajú pomocou kontroléra určeného <strong>pre</strong><br />
bandit.model. V tomto modely ide o jednoduché ovládanie oboch ramenných kĺbov.<br />
Obr. 4 – 4 Sled obrázkov ukazujúcich pohyb ruky.<br />
sa podarilo nájsť chybu, kvôli ktorej dochádzalo ku kolízii. Hrúbka pod-<br />
stavca modelu je z=0.1. V simulácii však bola len z=0.05, polovička podstavca sa<br />
nachádzala v kladnej časti osi z, druhá polovica v zápornej. Preto bolo potrebné<br />
nastaviť parameter modelu z na hodnotu z=0.05. Potom už nedochádzalo ku kolízii.<br />
40













