

Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
FEI KKUI<br />
3.4 Komunikácia s modelom pomocou kontroléra<br />
Základom <strong>pre</strong> komunikáciu s modelom je kontrolér. Kontrolér <strong>pre</strong>dstavuje program,<br />
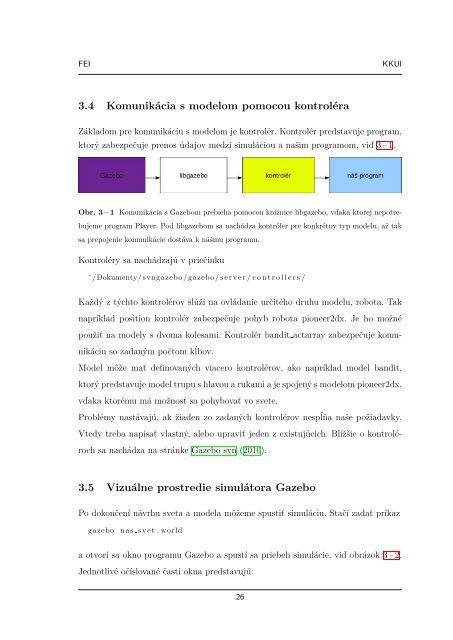
ktorý zabezpečuje <strong>pre</strong>nos údajov medzi simuláciou a našim programom, viď 3 – 1.<br />
Obr. 3 – 1 Komunikácia s Gazebom <strong>pre</strong>bieha pomocou knižnice libgazebo, vďaka ktorej nepotre-<br />
bujeme program <strong>Player</strong>. Pod libgazebom sa nachádza kontróler <strong>pre</strong> konkrétny typ modelu, až tak<br />
sa <strong>pre</strong>pojenie komunikácie dostáva k nášmu programu.<br />
Kontroléry sa nachádzajú v priečinku<br />
˜/Dokumenty/ svngazebo / gazebo / s e r v e r / c o n t r o l l e r s /<br />
Každý z týchto kontrolérov slúži na ovládanie určitého druhu modelu, robota. Tak<br />
napríklad position kontrolér zabezpečuje pohyb robota pioneer2dx. Je ho možné<br />
použiť na modely s dvoma kolesami. Kontrolér bandit actarray zabezpečuje komu-<br />
nikáciu so zadaným počtom kĺbov.<br />
Model môže mať definovaných viacero kontrolérov, ako napríklad model bandit,<br />
ktorý <strong>pre</strong>dstavuje model trupu s hlavou a rukami a je spojený s modelom pioneer2dx,<br />
vďaka ktorému má možnosť sa pohybovať vo svete.<br />
Problémy nastávajú, ak žiaden zo zadaných kontrolérov nespĺňa naše požiadavky.<br />
Vtedy treba napísať vlastný, alebo upraviť jeden z existujúcich. Bližšie o kontrolé-<br />
roch sa nachádza na stránke Gazebo svn (2010).<br />
3.5 Vizuálne prostredie simulátora Gazebo<br />
Po dokončení návrhu sveta a modela môžeme spustiť simuláciu. Stačí zadať príkaz<br />
gazebo n a s s v e t . world<br />
a otvorí sa okno programu Gazebo a spustí sa priebeh simulácie, viď obrázok 3 – 2.<br />
Jednotlivé očíslované časti okna <strong>pre</strong>dstavujú:<br />
26













