

Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...
Analýza softvérového prostredia pre riadenie robotov Player-Stage ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
FEI KKUI<br />
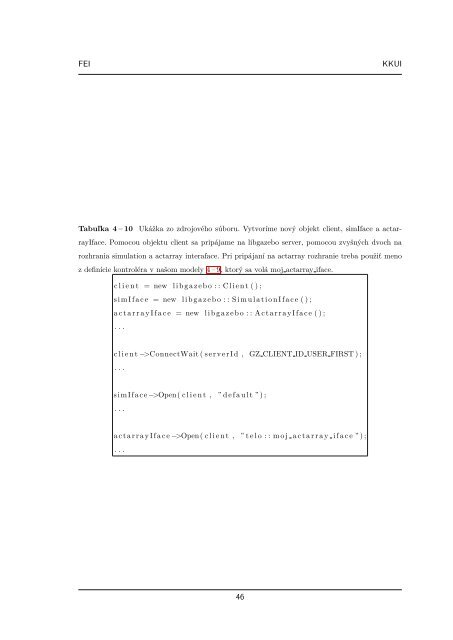
Tabuľka 4 – 10 Ukážka zo zdrojového súboru. Vytvoríme nový objekt client, simIface a actar-<br />
rayIface. Pomocou objektu client sa pripájame na libgazebo server, pomocou zvyšných dvoch na<br />
rozhrania simulation a actarray interaface. Pri pripájaní na actarray rozhranie treba použiť meno<br />
z definície kontroléra v našom modely 4 – 9, ktorý sa volá moj actarray iface.<br />
c l i e n t = new l i b g a z e b o : : C l i e n t ( ) ;<br />
s i m I f a c e = new l i b g a z e b o : : S i m u l a t i o n I f a c e ( ) ;<br />
a c t a r r a y I f a c e = new l i b g a z e b o : : A c t a r r a y I f a c e ( ) ;<br />
. . .<br />
c l i e n t −>ConnectWait ( s e r v e r I d , GZ CLIENT ID USER FIRST ) ;<br />
. . .<br />
simIface −>Open( c l i e n t , ” d e f a u l t ” ) ;<br />
. . .<br />
a c t a r r a y I f a c e −>Open( c l i e n t , ” t e l o : : m o j a c t a r r a y i f a c e ” ) ;<br />
. . .<br />
46













