

Dokument 1.pdf - Universität Siegen
Dokument 1.pdf - Universität Siegen
Dokument 1.pdf - Universität Siegen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
74 4 Signalverarbeitungsverfahren zur Verbesserung der Schadenslokalisation<br />
Eine weitere Reduzierung auf 20dB führt dazu, dass die Sensorspannung kaum mehr<br />
wahrnehmbar ist, siehe Abbildung 4.3b. Abbildung 4.3c zeigt, dass ein SNR-Niveau von<br />
160dB erforderlich ist, um einen Verlust in der Sensorspannung zu vermeiden. Dies entspricht<br />
annähernd einem rauschfreien Signal. Aus Abbildung 4.3d geht hervor, dass die Bestimmung<br />
der Ersteinsatzzeit umso besser ausfällt, je höher das SNR-Verhältnis ist. Bei etwa 50dB sinkt<br />
der Fehler in der Bestimmung der korrekten Ersteinsatzzeit von ursprünglich vier<br />
Abtastschritten auf Null ab. Eine positive Eigenschaft des MP-Algorithmus offenbart sich<br />
gerade an dieser Stelle, weil die Signalrekonstruktion auf Basis analytischer Funktionen<br />
stattfindet. Dadurch wird das SNR unendlich groß und die negative Einflussnahme durch das<br />
Rauschen kann systematisch vermieden werden.<br />
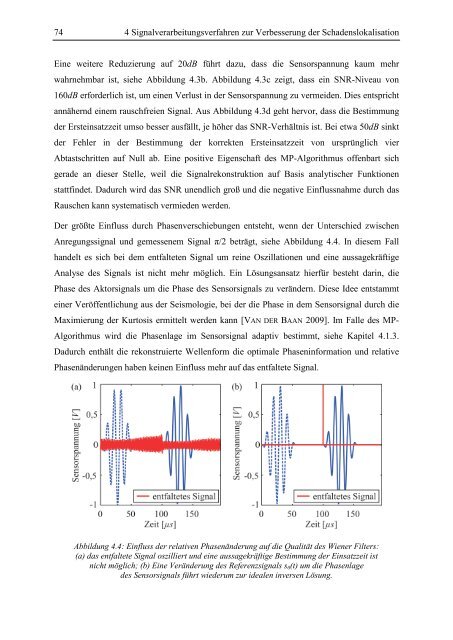
Der größte Einfluss durch Phasenverschiebungen entsteht, wenn der Unterschied zwischen<br />
Anregungssignal und gemessenem Signal π/2 beträgt, siehe Abbildung 4.4. In diesem Fall<br />
handelt es sich bei dem entfalteten Signal um reine Oszillationen und eine aussagekräftige<br />
Analyse des Signals ist nicht mehr möglich. Ein Lösungsansatz hierfür besteht darin, die<br />
Phase des Aktorsignals um die Phase des Sensorsignals zu verändern. Diese Idee entstammt<br />
einer Veröffentlichung aus der Seismologie, bei der die Phase in dem Sensorsignal durch die<br />
Maximierung der Kurtosis ermittelt werden kann [VAN DER BAAN 2009]. Im Falle des MP-<br />
Algorithmus wird die Phasenlage im Sensorsignal adaptiv bestimmt, siehe Kapitel 4.1.3.<br />
Dadurch enthält die rekonstruierte Wellenform die optimale Phaseninformation und relative<br />
Phasenänderungen haben keinen Einfluss mehr auf das entfaltete Signal.<br />
Abbildung 4.4: Einfluss der relativen Phasenänderung auf die Qualität des Wiener Filters:<br />
(a) das entfaltete Signal oszilliert und eine aussagekräftige Bestimmung der Einsatzzeit ist<br />
nicht möglich; (b) Eine Veränderung des Referenzsignals s0(t) um die Phasenlage<br />
des Sensorsignals führt wiederum zur idealen inversen Lösung.














