

KR AGILUS sixx - KUKA Robotics
KR AGILUS sixx - KUKA Robotics
KR AGILUS sixx - KUKA Robotics

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
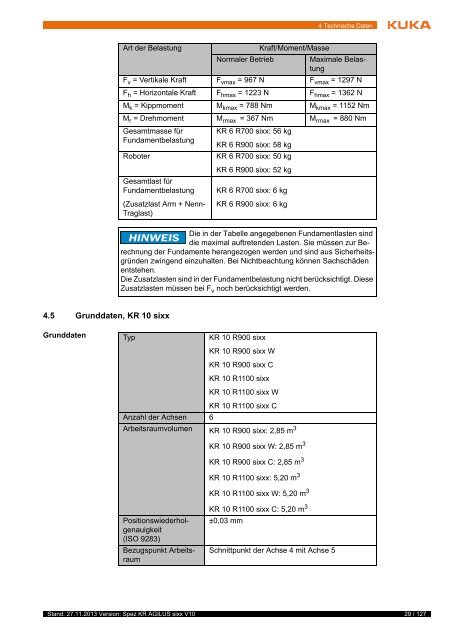
4 Technische Daten<br />
Art der Belastung<br />
Kraft/Moment/Masse<br />
Normaler Betrieb Maximale Belastung<br />
F v = Vertikale Kraft F vmax = 967 N F vmax = 1297 N<br />
F h = Horizontale Kraft F hmax = 1223 N F hmax = 1362 N<br />
M k = Kippmoment M kmax = 788 Nm M kmax = 1152 Nm<br />
M r = Drehmoment M rmax = 367 Nm M rmax = 880 Nm<br />
Gesamtmasse für<br />
Fundamentbelastung<br />
<strong>KR</strong> 6 R700 <strong>sixx</strong>: 56 kg<br />
<strong>KR</strong> 6 R900 <strong>sixx</strong>: 58 kg<br />
Roboter<br />
<strong>KR</strong> 6 R700 <strong>sixx</strong>: 50 kg<br />
<strong>KR</strong> 6 R900 <strong>sixx</strong>: 52 kg<br />
Gesamtlast für<br />
Fundamentbelastung<br />
(Zusatzlast Arm + Nenn-<br />
Traglast)<br />
<strong>KR</strong> 6 R700 <strong>sixx</strong>: 6 kg<br />
<strong>KR</strong> 6 R900 <strong>sixx</strong>: 6 kg<br />
Die in der Tabelle angegebenen Fundamentlasten sind<br />
die maximal auftretenden Lasten. Sie müssen zur Berechnung<br />
der Fundamente herangezogen werden und sind aus Sicherheitsgründen<br />
zwingend einzuhalten. Bei Nichtbeachtung können Sachschäden<br />
entstehen.<br />
Die Zusatzlasten sind in der Fundamentbelastung nicht berücksichtigt. Diese<br />
Zusatzlasten müssen bei F v noch berücksichtigt werden.<br />
4.5 Grunddaten, <strong>KR</strong> 10 <strong>sixx</strong><br />
Grunddaten<br />
Typ<br />
<strong>KR</strong> 10 R900 <strong>sixx</strong><br />
<strong>KR</strong> 10 R900 <strong>sixx</strong> W<br />
<strong>KR</strong> 10 R900 <strong>sixx</strong> C<br />
<strong>KR</strong> 10 R1100 <strong>sixx</strong><br />
<strong>KR</strong> 10 R1100 <strong>sixx</strong> W<br />
<strong>KR</strong> 10 R1100 <strong>sixx</strong> C<br />
Anzahl der Achsen 6<br />
Arbeitsraumvolumen <strong>KR</strong> 10 R900 <strong>sixx</strong>: 2,85 m 3<br />
<strong>KR</strong> 10 R900 <strong>sixx</strong> W: 2,85 m 3<br />
<strong>KR</strong> 10 R900 <strong>sixx</strong> C: 2,85 m 3<br />
<strong>KR</strong> 10 R1100 <strong>sixx</strong>: 5,20 m 3<br />
<strong>KR</strong> 10 R1100 <strong>sixx</strong> W: 5,20 m 3<br />
Positionswiederholgenauigkeit<br />
(ISO 9283)<br />
Bezugspunkt Arbeitsraum<br />
<strong>KR</strong> 10 R1100 <strong>sixx</strong> C: 5,20 m 3<br />
±0,03 mm<br />
Schnittpunkt der Achse 4 mit Achse 5<br />
Stand: 27.11.2013 Version: Spez <strong>KR</strong> <strong>AGILUS</strong> <strong>sixx</strong> V10<br />
29 / 127














