

KR AGILUS sixx - KUKA Robotics
KR AGILUS sixx - KUKA Robotics
KR AGILUS sixx - KUKA Robotics

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
4 Technische Daten<br />
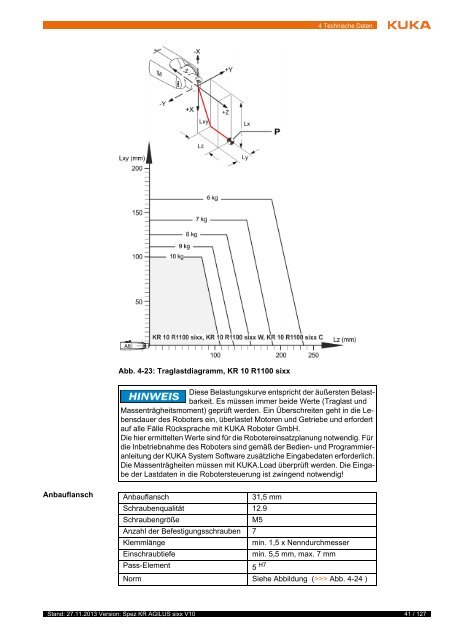
Abb. 4-23: Traglastdiagramm, <strong>KR</strong> 10 R1100 <strong>sixx</strong><br />
Diese Belastungskurve entspricht der äußersten Belastbarkeit.<br />
Es müssen immer beide Werte (Traglast und<br />
Massenträgheitsmoment) geprüft werden. Ein Überschreiten geht in die Lebensdauer<br />
des Roboters ein, überlastet Motoren und Getriebe und erfordert<br />
auf alle Fälle Rücksprache mit <strong>KUKA</strong> Roboter GmbH.<br />
Die hier ermittelten Werte sind für die Robotereinsatzplanung notwendig. Für<br />
die Inbetriebnahme des Roboters sind gemäß der Bedien- und Programmieranleitung<br />
der <strong>KUKA</strong> System Software zusätzliche Eingabedaten erforderlich.<br />
Die Massenträgheiten müssen mit <strong>KUKA</strong>.Load überprüft werden. Die Eingabe<br />
der Lastdaten in die Robotersteuerung ist zwingend notwendig!<br />
Anbauflansch<br />
Anbauflansch<br />
31,5 mm<br />
Schraubenqualität 12.9<br />
Schraubengröße<br />
M5<br />
Anzahl der Befestigungsschrauben 7<br />
Klemmlänge<br />
min. 1,5 x Nenndurchmesser<br />
Einschraubtiefe<br />
min. 5,5 mm, max. 7 mm<br />
Pass-Element<br />
5 H7<br />
Norm Siehe Abbildung (>>> Abb. 4-24 )<br />
Stand: 27.11.2013 Version: Spez <strong>KR</strong> <strong>AGILUS</strong> <strong>sixx</strong> V10<br />
41 / 127














