Modell AVIATOR Blitzschnell Kunstflugjet

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Technik | ArduPilot Mega | Autopilot auf Arduino-Basis<br />
Bezug<br />
3D Robotics<br />
7170 convoy<br />
San Diego, cA 92111, USA<br />
Telefon: 001/858/324 17 41<br />
Fax: 001/858/605 45 41<br />
e-Mail: help@3drobotics.com<br />
internet: www.store.diydrones.com<br />
Preis: 250,– US Dollar<br />
106 www.modell-aviator.de<br />
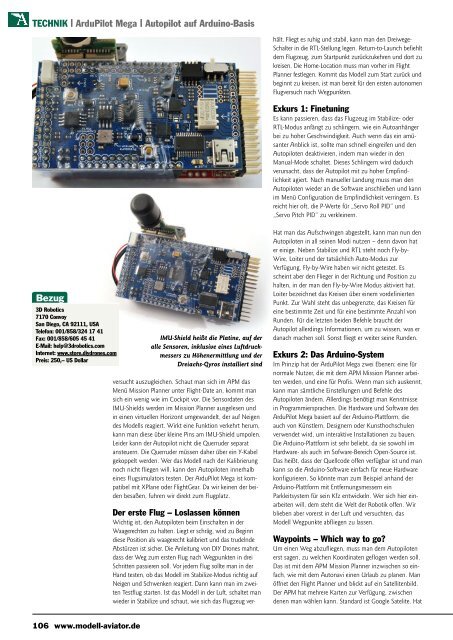
iMu-Shield heißt die Platine, auf der<br />
alle Sensoren, inklusive eines luftdruckmessers<br />
zu Höhenermittlung und der<br />
Dreiachs-Gyros installiert sind<br />
versucht auszugleichen. Schaut man sich im APM das<br />
Menü Mission Planner unter Flight-Date an, kommt man<br />
sich ein wenig wie im Cockpit vor. Die Sensordaten des<br />
IMU-Shields werden im Mission Planner ausgelesen und<br />
in einen virtuellen Horizont umgewandelt, der auf Neigen<br />
des <strong>Modell</strong>s reagiert. Wirkt eine Funktion verkehrt herum,<br />
kann man diese über kleine Pins am IMU-Shield umpolen.<br />
Leider kann der Autopilot nicht die Querruder separat<br />
ansteuern. Die Querruder müssen daher über ein Y-Kabel<br />
gekoppelt werden. Wer das <strong>Modell</strong> nach der Kalibrierung<br />
noch nicht fliegen will, kann den Autopiloten innerhalb<br />
eines Flugsimulators testen. Der ArduPilot Mega ist kompatibel<br />
mit XPlane oder FlightGear. Da wir keinen der beiden<br />
besaßen, fuhren wir direkt zum Flugplatz.<br />
Der erste Flug – Loslassen können<br />
Wichtig ist, den Autopiloten beim Einschalten in der<br />
Waagerechten zu halten. Liegt er schräg, wird zu Beginn<br />
diese Position als waagerecht kalibriert und das trudelnde<br />
Abstürzen ist sicher. Die Anleitung von DIY Drones mahnt,<br />
dass der Weg zum ersten Flug nach Wegpunkten in drei<br />
Schritten passieren soll. Vor jedem Flug sollte man in der<br />
Hand testen, ob das <strong>Modell</strong> im Stabilize-Modus richtig auf<br />
Neigen und Schwenken reagiert. Dann kann man im zweiten<br />
Testflug starten. Ist das <strong>Modell</strong> in der Luft, schaltet man<br />
wieder in Stabilize und schaut, wie sich das Flugzeug ver-<br />
hält. Fliegt es ruhig und stabil, kann man den Dreiwege-<br />
Schalter in die RTL-Stellung legen. Return-to-Launch befiehlt<br />
dem Flugzeug, zum Startpunkt zurückzukehren und dort zu<br />
kreisen. Die Home-Location muss man vorher im Flight<br />
Planner festlegen. Kommt das <strong>Modell</strong> zum Start zurück und<br />
beginnt zu kreisen, ist man bereit für den ersten autonomen<br />
Flugversuch nach Wegpunkten.<br />
exkurs 1: Finetuning<br />
Es kann passieren, dass das Flugzeug im Stabilize- oder<br />
RTL-Modus anfängt zu schlingern, wie ein Autoanhänger<br />
bei zu hoher Geschwindigkeit. Auch wenn das ein amüsanter<br />
Anblick ist, sollte man schnell eingreifen und den<br />
Autopiloten deaktivieren, indem man wieder in den<br />
Manual-Mode schaltet. Dieses Schlingern wird dadurch<br />
verursacht, dass der Autopilot mit zu hoher Empfindlichkeit<br />
agiert. Nach manueller Landung muss man den<br />
Autopiloten wieder an die Software anschließen und kann<br />
im Menü Configuration die Empfindlichkeit verringern. Es<br />
reicht hier oft, die P-Werte für „Servo Roll PID“ und<br />
„Servo Pitch PID“ zu verkleinern.<br />
Hat man das Aufschwingen abgestellt, kann man nun den<br />
Autopiloten in all seinen Modi nutzen – denn davon hat<br />
er einige. Neben Stabilize und RTL steht noch Fly-by-<br />
Wire, Loiter und der tatsächlich Auto-Modus zur<br />
Verfügung. Fly-by-Wire haben wir nicht getestet. Es<br />
scheint aber den Flieger in der Richtung und Position zu<br />
halten, in der man den Fly-by-Wire Modus aktiviert hat.<br />
Loiter bezeichnet das Kreisen über einem vordefinierten<br />
Punkt. Zur Wahl steht das unbegrenzte, das Kreisen für<br />
eine bestimmte Zeit und für eine bestimmte Anzahl von<br />
Runden. Für die letzten beiden Befehle braucht der<br />
Autopilot allerdings Informationen, um zu wissen, was er<br />
danach machen soll. Sonst fliegt er weiter seine Runden.<br />
exkurs 2: Das Arduino-System<br />
Im Prinzip hat der ArduPilot Mega zwei Ebenen: eine für<br />
normale Nutzer, die mit dem APM Mission Planner arbeiten<br />
werden, und eine für Profis. Wenn man sich auskennt,<br />
kann man sämtliche Einstellungen und Befehle des<br />
Autopiloten ändern. Allerdings benötigt man Kenntnisse<br />
in Programmiersprachen. Die Hardware und Software des<br />
ArduPilot Mega basiert auf der Arduino-Plattform, die<br />
auch von Künstlern, Designern oder Kunsthochschulen<br />
verwendet wird, um interaktive Installationen zu bauen.<br />
Die Arduino-Plattform ist sehr beliebt, da sie sowohl im<br />
Hardware- als auch im Sofware-Bereich Open-Source ist.<br />
Das heißt, dass der Quellcode offen verfügbar ist und man<br />
kann so die Arduino-Software einfach für neue Hardware<br />
konfigurieren. So könnte man zum Beispiel anhand der<br />
Arduino-Plattform mit Entfernungsmessern ein<br />
Parkleitsystem für sein Kfz entwickeln. Wer sich hier einarbeiten<br />
will, dem steht die Welt der Robotik offen. Wir<br />
blieben aber vorerst in der Luft und versuchten, das<br />
<strong>Modell</strong> Wegpunkte abfliegen zu lassen.<br />
Waypoints – Which way to go?<br />
Um einen Weg abzufliegen, muss man dem Autopiloten<br />
erst sagen, zu welchen Koordinaten geflogen werden soll.<br />
Das ist mit dem APM Mission Planner inzwischen so einfach,<br />
wie mit dem Autonavi einen Urlaub zu planen. Man<br />
öffnet den Flight Planner und blickt auf ein Satellitenbild.<br />
Der APM hat mehrere Karten zur Verfügung, zwischen<br />
denen man wählen kann. Standard ist Google Satelite. Hat