Modell AVIATOR Blitzschnell Kunstflugjet

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Technik | ArduPilot Mega | Autopilot auf Arduino-Basis<br />
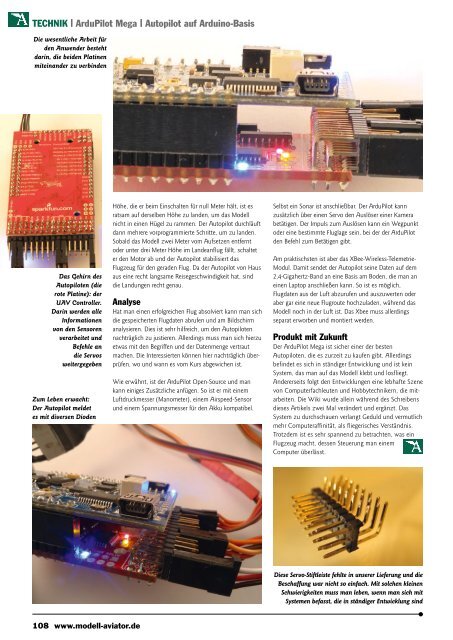
Die wesentliche Arbeit für<br />
den Anwender besteht<br />
darin, die beiden Platinen<br />
miteinander zu verbinden<br />
Das Gehirn des<br />
Autopiloten (die<br />
rote Platine): der<br />
uAV Controller.<br />
Darin werden alle<br />
informationen<br />
von den Sensoren<br />
verarbeitet und<br />
befehle an<br />
die Servos<br />
weitergegeben<br />
Zum leben erwacht:<br />
Der Autopilot meldet<br />
es mit diversen Dioden<br />
108 www.modell-aviator.de<br />
Höhe, die er beim Einschalten für null Meter hält, ist es<br />
ratsam auf derselben Höhe zu landen, um das <strong>Modell</strong><br />
nicht in einen Hügel zu rammen. Der Autopilot durchläuft<br />
dann mehrere vorprogrammierte Schritte, um zu landen.<br />
Sobald das <strong>Modell</strong> zwei Meter vom Aufsetzen entfernt<br />
oder unter drei Meter Höhe im Landeanflug fällt, schaltet<br />
er den Motor ab und der Autopilot stabilisiert das<br />
Flugzeug für den geraden Flug. Da der Autopilot von Haus<br />
aus eine recht langsame Reisegeschwindigkeit hat, sind<br />
die Landungen recht genau.<br />
Analyse<br />
Hat man einen erfolgreichen Flug absolviert kann man sich<br />
die gespeicherten Flugdaten abrufen und am Bildschirm<br />
analysieren. Dies ist sehr hilfreich, um den Autopiloten<br />
nachträglich zu justieren. Allerdings muss man sich hierzu<br />
etwas mit den Begriffen und der Datenmenge vertraut<br />
machen. Die Interessierten können hier nachträglich überprüfen,<br />
wo und wann es vom Kurs abgewichen ist.<br />
Wie erwähnt, ist der ArduPilot Open-Source und man<br />
kann einiges Zusätzliche anfügen. So ist er mit einem<br />
Luftdruckmesser (Manometer), einem Airspeed-Sensor<br />
und einem Spannungsmesser für den Akku kompatibel.<br />
Selbst ein Sonar ist anschließbar. Der ArduPilot kann<br />
zusätzlich über einen Servo den Auslöser einer Kamera<br />
betätigen. Der Impuls zum Auslösen kann ein Wegpunkt<br />
oder eine bestimmte Fluglage sein, bei der der ArduPilot<br />
den Befehl zum Betätigen gibt.<br />
Am praktischsten ist aber das XBee-Wireless-Telemetrie-<br />
Modul. Damit sendet der Autopilot seine Daten auf dem<br />
2,4-Gigahertz-Band an eine Basis am Boden, die man an<br />
einen Laptop anschließen kann. So ist es möglich,<br />
Flugdaten aus der Luft abzurufen und auszuwerten oder<br />
aber gar eine neue Flugroute hochzuladen, während das<br />
<strong>Modell</strong> noch in der Luft ist. Das Xbee muss allerdings<br />
separat erworben und montiert werden.<br />
Produkt mit Zukunft<br />
Der ArduPilot Mega ist sicher einer der besten<br />
Autopiloten, die es zurzeit zu kaufen gibt. Allerdings<br />
befindet es sich in ständiger Entwicklung und ist kein<br />
System, das man auf das <strong>Modell</strong> klebt und losfliegt.<br />
Andererseits folgt den Entwicklungen eine lebhafte Szene<br />
von Computerfachleuten und Hobbytechnikern, die mitarbeiten.<br />
Die Wiki wurde allein während des Schreibens<br />
dieses Artikels zwei Mal verändert und ergänzt. Das<br />
System zu durchschauen verlangt Geduld und vermutlich<br />
mehr Computeraffinität, als fliegerisches Verständnis.<br />
Trotzdem ist es sehr spannend zu betrachten, was ein<br />
Flugzeug macht, dessen Steuerung man einem<br />
Computer überlässt.<br />
Diese Servo-Stiftleiste fehlte in unserer lieferung und die<br />
beschaffung war nicht so einfach. Mit solchen kleinen<br />
Schwierigkeiten muss man leben, wenn man sich mit<br />
Systemen befasst, die in ständiger entwicklung sind