A Semi-Implicit, Three-Dimensional Model for Estuarine ... - USGS
A Semi-Implicit, Three-Dimensional Model for Estuarine ... - USGS
A Semi-Implicit, Three-Dimensional Model for Estuarine ... - USGS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
38 A <strong>Semi</strong>-<strong>Implicit</strong>, <strong>Three</strong>-<strong>Dimensional</strong> <strong>Model</strong> <strong>for</strong> <strong>Estuarine</strong> Circulation<br />
2.4.2.1 Kinematic Bottom Condition<br />
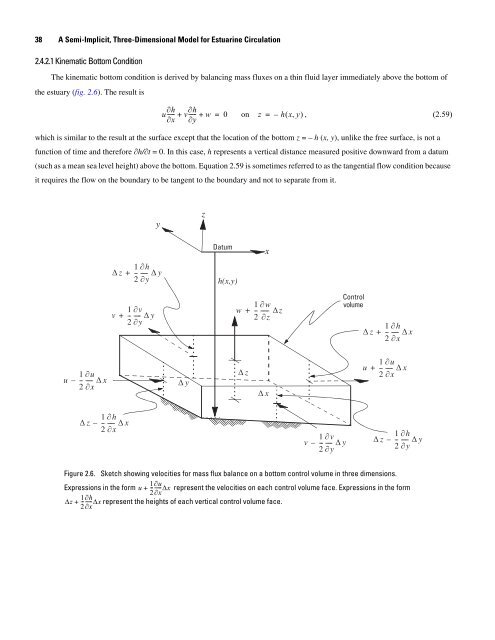
The kinematic bottom condition is derived by balancing mass fluxes on a thin fluid layer immediately above the bottom of<br />
the estuary (fig. 2.6). The result is<br />
u ∂h<br />
----- v<br />
∂x<br />
∂h<br />
+ ----- + w = 0 on z = – h(<br />
x, y)<br />
, (2.59)<br />
∂y<br />
which is similar to the result at the surface except that the location of the bottom z = – h (x, y), unlike the free surface, is not a<br />
function of time and there<strong>for</strong>e ∂h/∂t = 0. In this case, h represents a vertical distance measured positive downward from a datum<br />
(such as a mean sea level height) above the bottom. Equation 2.59 is sometimes referred to as the tangential flow condition because<br />
it requires the flow on the boundary to be tangent to the boundary and not to separate from it.<br />
1<br />
u --<br />
2<br />
u ∂<br />
– ----- Δ x<br />
∂x<br />
1<br />
Δ z --<br />
2<br />
h ∂<br />
– ----- Δ x<br />
∂x<br />
1<br />
Δ z --<br />
2<br />
h ∂<br />
+ ----- Δ y<br />
∂y<br />
1<br />
v --<br />
2<br />
v ∂<br />
+ ---- Δ y<br />
∂y<br />
y<br />
Δ y<br />
z<br />
Datum<br />
h(x,y)<br />
w<br />
Δ z<br />
x<br />
1<br />
--<br />
2<br />
w ∂<br />
+ ------ Δz<br />
∂z<br />
Δ x<br />
1<br />
v --<br />
2<br />
v ∂<br />
– ---- Δ y<br />
∂y<br />
Control<br />
volume<br />
1<br />
Δ z --<br />
2<br />
h ∂<br />
+ ----- Δ x<br />
∂x<br />
1<br />
u --<br />
2<br />
u ∂<br />
+ ----- Δ x<br />
∂x<br />
1<br />
Δ z --<br />
2<br />
h ∂<br />
– ----- Δ y<br />
∂y<br />
Figure 2.6. Sketch showing velocities <strong>for</strong> mass flux balance on a bottom control volume in three dimensions.<br />
1<br />
Expressions in the <strong>for</strong>m u -- represent the velocities on each control volume face. Expressions in the <strong>for</strong>m<br />
2<br />
represent the heights of each vertical control volume face.<br />
∂u<br />
+ -----Δx<br />
∂x<br />
1<br />
Δz --<br />
2<br />
∂h<br />
+<br />
-----Δx<br />
∂x