A Semi-Implicit, Three-Dimensional Model for Estuarine ... - USGS
A Semi-Implicit, Three-Dimensional Model for Estuarine ... - USGS
A Semi-Implicit, Three-Dimensional Model for Estuarine ... - USGS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2.4.2.2 Dynamic Bottom Condition<br />
2. Governing Equations and Boundary Conditions 39<br />
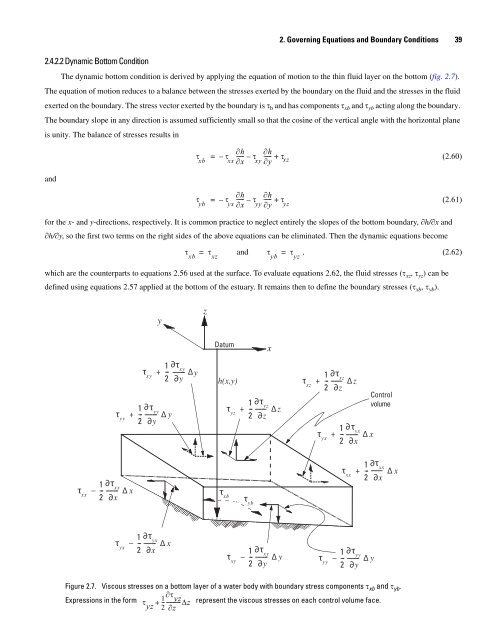
The dynamic bottom condition is derived by applying the equation of motion to the thin fluid layer on the bottom (fig. 2.7).<br />
The equation of motion reduces to a balance between the stresses exerted by the boundary on the fluid and the stresses in the fluid<br />
exerted on the boundary. The stress vector exerted by the boundary is τ b and has components τ xb and τ yb acting along the boundary.<br />
The boundary slope in any direction is assumed sufficiently small so that the cosine of the vertical angle with the horizontal plane<br />
is unity. The balance of stresses results in<br />
and<br />
τ xb<br />
τ yb<br />
∂h ∂h<br />
= – τ ----- – τ ----- + τ<br />
xx ∂x xy ∂y xz<br />
(2.60)<br />
τ -----<br />
∂h ∂h<br />
= – – τ ----- + τ (2.61)<br />
yx ∂x yy ∂y yz<br />
<strong>for</strong> the x- and y-directions, respectively. It is common practice to neglect entirely the slopes of the bottom boundary, ∂h/∂x and<br />
∂h/∂y, so the first two terms on the right sides of the above equations can be eliminated. Then the dynamic equations become<br />
τ xb<br />
= τ and τ<br />
xz<br />
yb<br />
= τ , (2.62)<br />
yz<br />
which are the counterparts to equations 2.56 used at the surface. To evaluate equations 2.62, the fluid stresses (τ xz, τ yz) can be<br />
defined using equations 2.57 applied at the bottom of the estuary. It remains then to define the boundary stresses (τ xb, τ yb).<br />
τ xx<br />
τ yy<br />
1<br />
--<br />
2<br />
τ ∂ xx<br />
– -------- Δ x<br />
∂ x<br />
τ yx<br />
τ xy<br />
y<br />
1<br />
--<br />
2<br />
τ ∂<br />
yy<br />
+ -------- Δ y<br />
∂ y<br />
1<br />
--<br />
2<br />
τ ∂ yx<br />
– -------- Δ x<br />
∂ x<br />
1<br />
--<br />
2<br />
τ ∂<br />
xy<br />
+ -------- Δy<br />
∂ y<br />
z<br />
Datum<br />
h(x,y)<br />
τ xb<br />
τ yz<br />
τ xy<br />
x<br />
1<br />
--<br />
2<br />
τ ∂ yz<br />
+ -------- Δ z<br />
∂ z<br />
τ yb<br />
1<br />
--<br />
2<br />
τ ∂ xy<br />
– -------- Δ y<br />
∂ y<br />
τ xz<br />
1<br />
--<br />
2<br />
τ ∂ xz<br />
+ -------- Δ z<br />
∂ z<br />
τ yx<br />
τ yy<br />
1<br />
--<br />
2<br />
τ ∂ yx<br />
+ -------- Δ x<br />
∂ x<br />
τ xx<br />
1<br />
--<br />
2<br />
τ ∂ yy<br />
– -------- Δ y<br />
∂ y<br />
Control<br />
volume<br />
1<br />
--<br />
2<br />
τ ∂ xx<br />
+ -------- Δ x<br />
∂ x<br />
Figure 2.7. Viscous stresses on a bottom layer of a water body with boundary stress components τ xb and τ yb.<br />
Expressions in the <strong>for</strong>m 1<br />
τ -- represent the viscous stresses on each control volume face.<br />
yz 2<br />
∂τ yz<br />
+<br />
---------- Δz<br />
∂z