

a la physique de l'information - Lisa - Université d'Angers
a la physique de l'information - Lisa - Université d'Angers
a la physique de l'information - Lisa - Université d'Angers

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
probability of error (expected as small as possible).<br />
This Bayesian <strong>de</strong>tection strategy requires that<br />
probabilities (P0, P1 ¼ 1 P0) of both hypotheses<br />
(respectively, H0, H1) of Eq. (2) are known. This<br />
assumption, typically valid in the domain of<br />
telecommunication, is not possible in other applications<br />
such as sonar or radar [2]. When P0 and P1 are<br />
unknown, if the <strong>de</strong>cision between (hypothesis H1)<br />
and (hypothesis H0) is directly based on the linear<br />
signal–noise mixture, the observable data set x, a<br />
strategy to implement an optimal <strong>de</strong>tection is to<br />
seek to maximize the probability of <strong>de</strong>tection<br />
Z<br />
PD ¼ pðxjH1Þ dx, (21)<br />
R1<br />
while keeping the probability of false a<strong>la</strong>rm<br />
Z<br />
PF ¼ pðxjH0Þ dx (22)<br />
R1<br />
no <strong>la</strong>rger than a prescribed level PF;sup. This<br />
constrained maximization is achieved by the optimal<br />
Neyman–Pearson <strong>de</strong>tector, which also implements<br />
a likelihood-ratio test. When the input noise<br />
xðtÞ is Gaussian the best <strong>de</strong>tector in the Neyman–<br />
Pearson sense takes a form very simi<strong>la</strong>r to the linear<br />
<strong>de</strong>tector <strong>de</strong>scribed in Fig. 1a [2]: a corre<strong>la</strong>tion<br />
receiver which computes the statistic TðxÞ ¼<br />
P N 1<br />
j¼0 xðtjÞsðtjÞ is followed by the Neyman–Pearson<br />
likelihood-ratio test based on this statistic TðxÞ,<br />
LðTðxÞÞ _ H1<br />
mðPF;supÞ, (23)<br />
H0<br />
with a threshold mðPF;supÞ, a function of PF;sup,<br />
which is found from Eq. (22) by imposing<br />
PFpPF;sup. The probability of <strong>de</strong>tection of this<br />
Neyman–Pearson linear <strong>de</strong>tector is given by<br />
PD ¼ erfc erfc 1 ðPF;supÞ s0<br />
s1<br />
m1 m0<br />
s0<br />
(24)<br />
with, for k 2f0; 1g, means mk ¼ E½TðxÞjHkŠ,<br />
variance s2 k ¼ var½TðxÞjHkŠ and erfcðuÞ ¼ R þ1<br />
u ð1=<br />
pffiffiffiffiffi 2 2pÞ<br />
expð v =2Þ dv. When the input noise xðtÞ is<br />
non-Gaussian, the optimal <strong>de</strong>tector in the Neyman–<br />
Pearson, in general, is difficult to <strong>de</strong>sign. The same<br />
nonlinear array of Fig. 2 can be used again as<br />
preprocessor to <strong>de</strong>sign a simple suboptimal nonlinear<br />
<strong>de</strong>tector capable of outperforming the<br />
Neyman–Pearson linear <strong>de</strong>tector when the input<br />
noise xðtÞ is non-Gaussian. Therefore, this<br />
Neyman–Pearson nonlinear <strong>de</strong>tector first applies<br />
the observable data set x ¼ðxðt1Þ; ...; xðtNÞÞ at the<br />
ARTICLE IN PRESS<br />
D. Rousseau et al. / Signal Processing 86 (2006) 3456–3465 3463<br />
probability of <strong>de</strong>tection P D<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0 0.5 1 1.5 2 2.5 3<br />
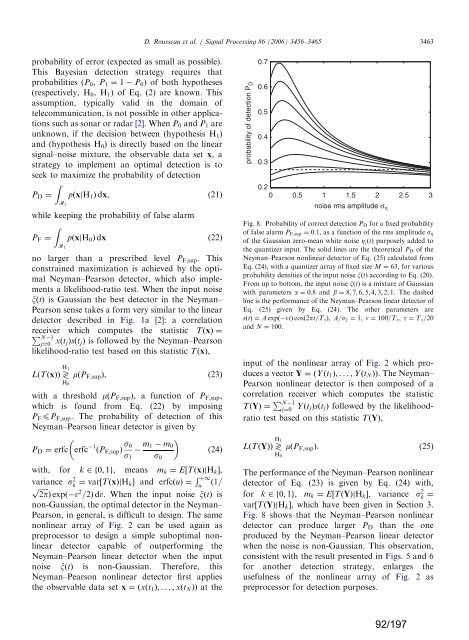
noise rms amplitu<strong>de</strong> ση Fig. 8. Probability of correct <strong>de</strong>tection PD for a fixed probability<br />
of false a<strong>la</strong>rm PF;sup ¼ 0:1, as a function of the rms amplitu<strong>de</strong> sZ<br />
of the Gaussian zero-mean white noise Z iðtÞ purposely ad<strong>de</strong>d to<br />
the quantizer input. The solid lines are the theoretical PD of the<br />
Neyman–Pearson nonlinear <strong>de</strong>tector of Eq. (25) calcu<strong>la</strong>ted from<br />
Eq. (24), with a quantizer array of fixed size M ¼ 63, for various<br />
probability <strong>de</strong>nsities of the input noise xðtÞ according to Eq. (20).<br />
From up to bottom, the input noise xðtÞ is a mixture of Gaussian<br />
with parameters a ¼ 0:8 and b ¼ 8; 7; 6; 5; 4; 3; 2; 1. The dashed<br />
line is the performance of the Neyman–Pearson linear <strong>de</strong>tector of<br />
Eq. (25) given by Eq. (24). The other parameters are<br />
sðtÞ ¼A expð ntÞ cosð2pt=T sÞ, A=sx ¼ 1, n ¼ 100=T s, t ¼ T s=20<br />
and N ¼ 100.<br />
input of the nonlinear array of Fig. 2 which produces<br />
a vector Y ¼ðYðt1Þ; ...; YðtNÞÞ. The Neyman–<br />
Pearson nonlinear <strong>de</strong>tector is then composed of a<br />
corre<strong>la</strong>tion receiver which computes the statistic<br />
TðYÞ ¼ PN 1<br />
j¼0 YðtjÞsðtjÞ followed by the likelihoodratio<br />
test based on this statistic TðYÞ,<br />
LðTðYÞÞ _ H1<br />
mðPF;supÞ. (25)<br />
H0<br />
The performance of the Neyman–Pearson nonlinear<br />
<strong>de</strong>tector of Eq. (23) is given by Eq. (24) with,<br />
for k 2f0; 1g, mk ¼ E½TðYÞjHkŠ, variance s 2 k ¼<br />
var½TðYÞjHkŠ, which have been given in Section 3.<br />
Fig. 8 shows that the Neyman–Pearson nonlinear<br />
<strong>de</strong>tector can produce <strong>la</strong>rger PD than the one<br />
produced by the Neyman–Pearson linear <strong>de</strong>tector<br />
when the noise is non-Gaussian. This observation,<br />
consistent with the result presented in Figs. 5 and 6<br />
for another <strong>de</strong>tection strategy, en<strong>la</strong>rges the<br />
usefulness of the nonlinear array of Fig. 2 as<br />
preprocessor for <strong>de</strong>tection purposes.<br />
92/197