PRE-DRIVE C2X Deliverable D0.3 Final report_20100929.pdf
PRE-DRIVE C2X Deliverable D0.3 Final report_20100929.pdf
PRE-DRIVE C2X Deliverable D0.3 Final report_20100929.pdf

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Final</strong> Report <strong>PRE</strong>-<strong>DRIVE</strong> <strong>C2X</strong> 29.9.2010<br />
To give a short description of the hardware architecture, two car computers are<br />
being used: One based on Linux, where the connection to the car bus system and a<br />
GPS device has been implemented and one based on Windows XP, where the<br />
remaining implementation code lies. Moreover, a third computer is being used to<br />
control the two separate displays. Connection to the environment is being<br />
established via a NEC Link Bird. <strong>Final</strong>ly, a GPS device offers access to the GPS<br />
signal.<br />
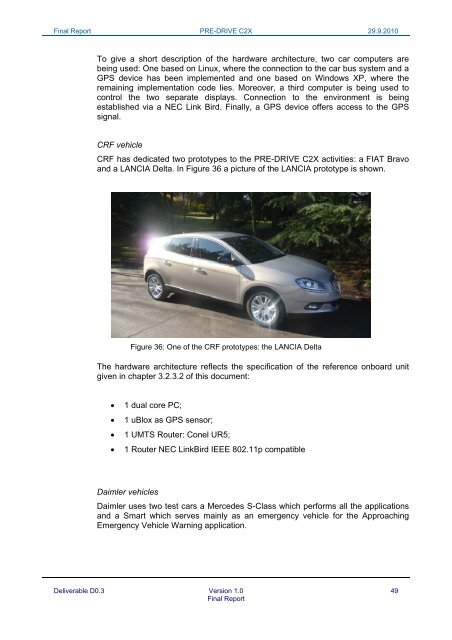
CRF vehicle<br />
CRF has dedicated two prototypes to the <strong>PRE</strong>-<strong>DRIVE</strong> <strong>C2X</strong> activities: a FIAT Bravo<br />
and a LANCIA Delta. In Figure 36 a picture of the LANCIA prototype is shown.<br />
Figure 36: One of the CRF prototypes: the LANCIA Delta<br />
The hardware architecture reflects the specification of the reference onboard unit<br />
given in chapter 3.2.3.2 of this document:<br />
<br />
<br />
<br />
<br />
1 dual core PC;<br />
1 uBlox as GPS sensor;<br />
1 UMTS Router: Conel UR5;<br />
1 Router NEC LinkBird IEEE 802.11p compatible<br />
Daimler vehicles<br />
Daimler uses two test cars a Mercedes S-Class which performs all the applications<br />
and a Smart which serves mainly as an emergency vehicle for the Approaching<br />
Emergency Vehicle Warning application.<br />
<strong>Deliverable</strong> <strong>D0.3</strong> Version 1.0 49<br />
<strong>Final</strong> Report