research activities in 2007 - CSEM
research activities in 2007 - CSEM
research activities in 2007 - CSEM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Encoder – Nanometric Optical Absolute Position Encoder<br />
P. Masa, E. Franzi, J. Pierer, P. Glocker, J.-M. Mayor, D. Fengels<br />
An optical absolute position encoder pr<strong>in</strong>ciple is presented which can comb<strong>in</strong>e many attractive features such as 24 bit resolution per 100 mm,<br />
compact design, optic-less shadow imag<strong>in</strong>g, sampl<strong>in</strong>g rate exceed<strong>in</strong>g 1MHz and robustness. The detectable displacement is several hundred times<br />
smaller than the wavelength of the light and only 10 times larger than the diameter of the silicon atom.<br />
Comb<strong>in</strong><strong>in</strong>g all the attractive features <strong>in</strong> a position encoder<br />
such as high-resolution, absolute, compact, high-speed is a<br />
real challenge today. Such an encoder clearly has a great<br />
potential <strong>in</strong> various fields like robotics, automation, mach<strong>in</strong>e<br />
tools, automotive, aerospace; just to mention a few.<br />
An optical absolute position encoder technology developed at<br />
<strong>CSEM</strong> has the potential to comb<strong>in</strong>e all these attractive<br />
features. Nanometric resolution has been established us<strong>in</strong>g<br />
ultra-compact USB camera, l<strong>in</strong>ear glass scale, LED<br />
illum<strong>in</strong>ation, without the need for optics, as shown <strong>in</strong> Figure 1.<br />
Note that the detectable displacement is several hundred<br />
times smaller than the wavelength of the light and only<br />
10 times larger than the diameter of the silicon atom. Highspeed<br />
opto-ASIC implementation by <strong>CSEM</strong> proved that<br />
sampl<strong>in</strong>g frequency of such an encoder may exceed 1MHz [1] .<br />
Optic-less shadow-imag<strong>in</strong>g permits compact design and major<br />
cost reduction.<br />
Figure 1: Shadow imag<strong>in</strong>g experimental setup consist<strong>in</strong>g of a<br />
compact USB camera, transparent scale and LED illum<strong>in</strong>ation (LED<br />
not shown here)<br />
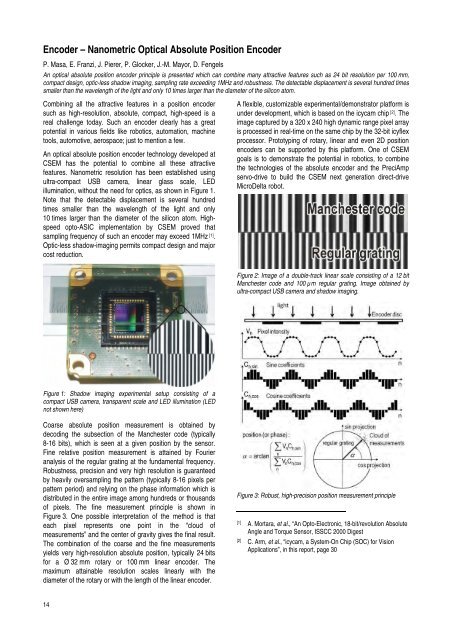
Coarse absolute position measurement is obta<strong>in</strong>ed by<br />
decod<strong>in</strong>g the subsection of the Manchester code (typically<br />
8-16 bits), which is seen at a given position by the sensor.<br />
F<strong>in</strong>e relative position measurement is atta<strong>in</strong>ed by Fourier<br />
analysis of the regular grat<strong>in</strong>g at the fundamental frequency.<br />
Robustness, precision and very high resolution is guaranteed<br />
by heavily oversampl<strong>in</strong>g the pattern (typically 8-16 pixels per<br />
pattern period) and rely<strong>in</strong>g on the phase <strong>in</strong>formation which is<br />
distributed <strong>in</strong> the entire image among hundreds or thousands<br />
of pixels. The f<strong>in</strong>e measurement pr<strong>in</strong>ciple is shown <strong>in</strong><br />
Figure 3. One possible <strong>in</strong>terpretation of the method is that<br />
each pixel represents one po<strong>in</strong>t <strong>in</strong> the “cloud of<br />
measurements” and the center of gravity gives the f<strong>in</strong>al result.<br />
The comb<strong>in</strong>ation of the coarse and the f<strong>in</strong>e measurements<br />
yields very high-resolution absolute position, typically 24 bits<br />
for a Ø 32 mm rotary or 100 mm l<strong>in</strong>ear encoder. The<br />
maximum atta<strong>in</strong>able resolution scales l<strong>in</strong>early with the<br />
diameter of the rotary or with the length of the l<strong>in</strong>ear encoder.<br />
14<br />
A flexible, customizable experimental/demonstrator platform is<br />
under development, which is based on the icycam chip [2] . The<br />
image captured by a 320 x 240 high dynamic range pixel array<br />
is processed <strong>in</strong> real-time on the same chip by the 32-bit icyflex<br />
processor. Prototyp<strong>in</strong>g of rotary, l<strong>in</strong>ear and even 2D position<br />
encoders can be supported by this platform. One of <strong>CSEM</strong><br />
goals is to demonstrate the potential <strong>in</strong> robotics, to comb<strong>in</strong>e<br />
the technologies of the absolute encoder and the PreciAmp<br />
servo-drive to build the <strong>CSEM</strong> next generation direct-drive<br />
MicroDelta robot.<br />
Figure 2: Image of a double-track l<strong>in</strong>ear scale consist<strong>in</strong>g of a 12 bit<br />
Manchester code and 100 µm regular grat<strong>in</strong>g. Image obta<strong>in</strong>ed by<br />
ultra-compact USB camera and shadow imag<strong>in</strong>g.<br />
Figure 3: Robust, high-precision position measurement pr<strong>in</strong>ciple<br />
[1] A. Mortara, et al., “An Opto-Electronic, 18-bit/revolution Absolute<br />
Angle and Torque Sensor, ISSCC 2000 Digest<br />
[2] C. Arm, et al., “icycam, a System-On Chip (SOC) for Vision<br />
Applications”, <strong>in</strong> this report, page 30