research activities in 2007 - CSEM
research activities in 2007 - CSEM
research activities in 2007 - CSEM

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Isolation and Reversible Immobilization of S<strong>in</strong>gle Cells<br />
S. F. Graf, P. Schmid, H. F. Knapp<br />
An <strong>in</strong>novative system to meet the need of drug <strong>research</strong>ers is under development. The novel approach <strong>in</strong>tegrates new technologies <strong>in</strong>clud<strong>in</strong>g<br />
microrobotics and microfluidics to achieve a high throughput screen<strong>in</strong>g rate which will replace time consum<strong>in</strong>g and costly manual operations used<br />
today. To this end, a multipurpose robotic system called ‘CellBot’ was developed consist<strong>in</strong>g of the high-precision robot ‘µDelta’, the fully automated<br />
<strong>in</strong>verse reflected light microscope ‘iMic’, the tool stage, the fixed work<strong>in</strong>g platform and the “Carousel” for reversible immobiliz<strong>in</strong>g of the cells. By<br />
us<strong>in</strong>g this visual feedback controlled setup an automated isolation and reversible immobilization of s<strong>in</strong>gle Xenopus laevis oocytes could be<br />
demonstrated.<br />
Cell-based assays are set to become the preferred choice of<br />
screen<strong>in</strong>g <strong>in</strong> drug discovery <strong>research</strong>, potentially overtak<strong>in</strong>g<br />
more traditional approaches that <strong>in</strong>clude animal models. New<br />
target screen<strong>in</strong>g often requires the use of cell assays to detect<br />
specific cellular pathways of chemical compounds, therapeutic<br />
prote<strong>in</strong>s, siRNA agents and other structures of <strong>in</strong>terest. Insight<br />
from these assays could help more efficient discovery of<br />
effective drugs, thus sav<strong>in</strong>g time and costs as well as the<br />
need for future secondary screens. The emphasis now for<br />
cell-based assay manufacturers is to develop easy-to-use and<br />
highly sensitive cell systems as an alternative to current<br />
rodent bioassays. High throughput screen<strong>in</strong>g (HTS) us<strong>in</strong>g cellbased<br />
assays will particularly become <strong>in</strong>creas<strong>in</strong>gly needed for<br />
both <strong>in</strong>dustrial and scientific applications. Introduction of DNA,<br />
siRNA, or other substances <strong>in</strong>to cells is one important<br />
micromanipulation technology applied to develop and optimize<br />
various cellular systems, which enables cell systems either to<br />
more closely approximate <strong>in</strong> vivo test<strong>in</strong>g or to become more<br />
competent or more specific for various <strong>in</strong> vitro applications.<br />
However, the pharmaceutical <strong>in</strong>dustry needs a highthroughput,<br />
efficient, and automated system for direct delivery<br />
of substances (<strong>in</strong>clud<strong>in</strong>g compounds, DNA, siRNA and mAbs)<br />
<strong>in</strong>to a large number of cells for HTS use.<br />
To address this need, the development of an automated<br />
micro<strong>in</strong>jection system is <strong>in</strong> process. Micro<strong>in</strong>jection is a<br />
technique where a glass capillary filled with substances is<br />
controlled by a micromanipulator. Cells have to be <strong>in</strong>dividually<br />
immobilized while the capillary with an apex of 0.5 to 10 µm<br />
diameter penetrates the cell and a pressur<strong>in</strong>g device <strong>in</strong>jects<br />
the substances.<br />
Therefore, as a first step, the isolation of s<strong>in</strong>gle Xenopus<br />
laevis oocytes with a follow<strong>in</strong>g reversible immobilization is<br />
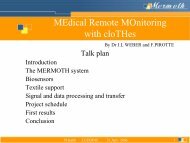
demonstrated. The “CellBot” [1] setup is used, consist<strong>in</strong>g of a<br />
high precision robot “µDelta” equipped with a glass capillary<br />
connected to a peristaltic pump, a fully automated <strong>in</strong>verted<br />
light microscope “iMic” and a fixed work<strong>in</strong>g platform with a<br />
Petri dish and a “Carousel” for further cell manipulations<br />
(Figure 1). To start the process, the user has to place a<br />
suspension of Xenopus laevis oocytes <strong>in</strong>to a Petri dish. Via<br />
the user <strong>in</strong>terface the rout<strong>in</strong>e can be started: The iMic scans<br />
the Petri dish (Figure 2) and cells of <strong>in</strong>terest are automatically<br />
identified via a pattern match<strong>in</strong>g software based on a set of<br />
given parameters If a cell is detected, the glass capillary is<br />
automatically guided by vision feedback to pick up the cell and<br />
places it <strong>in</strong>to the carousel. The carousel conta<strong>in</strong>s specially<br />
designed cone structures for immobiliz<strong>in</strong>g the cells, with or<br />
without negative pressure. By rotat<strong>in</strong>g the “carousel” the cell is<br />
moved to the micro<strong>in</strong>jection position, which will be<br />
implemented at a later stage. F<strong>in</strong>ally the carousel can be<br />
94<br />
rotated to two additional positions, where the cells can be<br />
released <strong>in</strong>to a collection or waste conta<strong>in</strong>er, respectively. The<br />
release of the cells is aided by pressure pulses. The collection<br />
conta<strong>in</strong>er can be removed by the user for further process<strong>in</strong>g.<br />
collectio<br />
n<br />
carousel<br />
pipette<br />
petri<br />
Figure 1: Workspace of the CellBot where the micropipette is about<br />
to pick a cell to transfer it to the carousel for immobilization.<br />
Figure 2: A special comb<strong>in</strong>ation of bright– and darkfield illum<strong>in</strong>ation<br />
enables simultaneous detection of several parameters of the<br />
Xenopus laevis oocytes, such as shape, size, and coloration, that will<br />
identify viable cells.<br />
This work was partly funded by the EU (project NMP2-CT-<br />
2006-026622) and the cantons of central Switzerland and the<br />
MCCS (Micro Center Central Switzerland). <strong>CSEM</strong> thanks<br />
them for their support.<br />
[1] T. Stöckli, et al., “High precision robotics for automated cell<br />
handl<strong>in</strong>g“, <strong>CSEM</strong> Scientific and Technical Report 2006, page 83