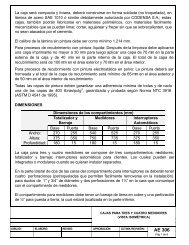
Robots para los pacientesIngenio en la medicinaLa rehabilitación física <strong>de</strong> lospacientes con parálisis <strong>de</strong> un lado<strong>de</strong>l cuerpo (hemiparesia espástica) esun <strong>de</strong>safío muy complejo. La parálisispue<strong>de</strong> estar provocada por varias causas,entre ellas la hemorragia cerebralo infarto (apoplejía), traumas, tumores,esclerosis múltiple y <strong>de</strong>fectos congénitos.La causa más común es la apoplejía,que pue<strong>de</strong> producir daños permanentesy es uno <strong>de</strong> los trastornos neurológicosmás comunes en Europa,con un 80% <strong>de</strong> supervivientes quepresentan importantes daños neurológicosy un 31% que necesitan ayudaen las activida<strong>de</strong>s <strong>de</strong> cada día. En laUnión Europa (UE), la inci<strong>de</strong>nciamedia está entre 150 y 400 casos porcada 100.000 habitantes, aunque varíamucho <strong>de</strong> una región a otra. En Holanda,la inci<strong>de</strong>ncia es <strong>de</strong> 526, mientrasque en Suecia es <strong>de</strong> 941 por cada100.000 habitantes. En Asia Central yen los nuevos estados in<strong>de</strong>pendientes<strong>de</strong> la antigua Unión Soviética, el índice<strong>de</strong> inci<strong>de</strong>ncia es 600, mientras queen Estados Unidos es 214. Es necesariomejorar la asistencia médica <strong>de</strong>1 Sistema terapéutico REHAROBEl prototipo <strong>de</strong>l sistema terapéuticoREHAROB se muestra en 1 y las ortosisinstrumentadas (aparatos ortopédicosa medida) que sujetan el brazo yel antebrazo <strong>de</strong>l paciente se presentanen 2a . Las ortosis están equipadas conel transductor estándar <strong>de</strong> fuerza/par,<strong>de</strong> seis grados <strong>de</strong> libertad, y con unmecanismo <strong>de</strong> <strong>de</strong>sconexión <strong>de</strong> seguridad.La <strong>de</strong>sconexión <strong>de</strong> seguridadpue<strong>de</strong> activarse por una señal <strong>de</strong>emergencia <strong>de</strong>l paciente, <strong>de</strong>l fisioteraaArmario <strong>de</strong>l robotb Robot industrial IRB 140c Robot industrial IRB 1400Hd Ortosis instrumentada <strong>de</strong>l brazoe Ortosis instrumentada <strong>de</strong>l antebrazof Lechog Panel <strong>de</strong> operaciónh Dispositivo <strong>de</strong> habilitación <strong>de</strong>l paciente(bloqueo <strong>de</strong> ‘conductor muerto’)fchdgebaestos pacientes, no sólo en el campo<strong>de</strong> una terapia intensiva, sino tambiénen la rehabilitación.Los pacientes apopléticos respon<strong>de</strong>npositivamente al movimiento pasivo<strong>de</strong> sus miembros dañados: es posiblereejercitar el cerebro y lograr uncierto grado <strong>de</strong> recuperación funcional.En el caso <strong>de</strong> los miembros superiores,el movimiento pasivo implicala intervención <strong>de</strong> un fisioterapeutaque agarra el codo y la muñeca <strong>de</strong>lpaciente y flexiona repetidamente elbrazo durante 40–45 minutos. Paraconseguir una rehabilitación eficaz se<strong>de</strong>be hacer este ejercicio pasivo dosveces al día durante un período mínimo<strong>de</strong> un mes, seguido <strong>de</strong> varios meses<strong>de</strong> ejercicio activo, en combinacióncon el trabajo activo <strong>de</strong>l fisioterapeuta.A menudo no son posiblesestos niveles <strong>de</strong> atención, pero inclusosi los pacientes tienen fácil accesoa fisioterapeutas bien formados, lostratamientos se podrían mejorar con laayuda <strong>de</strong> robots.Los pacientes apopléticosrespon<strong>de</strong>n positivamenteal movimiento pasivo <strong>de</strong>sus miembros dañados:es posible reejercitar elcerebro y lograr ciertogrado <strong>de</strong> recuperaciónfuncional.Los comienzosLa historia <strong>de</strong> la robótica <strong>de</strong> rehabilitaciónse remonta a los años ochenta<strong>de</strong>l pasado siglo. Al principio no seconsi<strong>de</strong>raba que los robots industrialesfueran a<strong>de</strong>cuados para la robótica<strong>de</strong> rehabilitación <strong>de</strong>bido a la pesa<strong>de</strong>z<strong>de</strong> sus movimientos y a su historial <strong>de</strong>acci<strong>de</strong>ntes. Pero en 1999, investigadores<strong>de</strong> la Universidad <strong>de</strong> Tecnologíay Economía <strong>de</strong> Budapest (Hungría)retomaron la i<strong>de</strong>a <strong>de</strong> usar robots industrialesestándar para la terapia enhumanos. El proyecto REHAROB fueel primero en el mundo que buscabautilizar robots industriales estándar,fabricados en serie, para la fisioterapia<strong>de</strong> pacientes apopléticos con hemiparesiaespástica. Se creó un consorciointernacional, integrado por organizaciones<strong>de</strong> Hungría, Reino Unido,Alemania y Bulgaria, que empezó atrabajar en el <strong>de</strong>sarrollo <strong>de</strong> un sistemarobótico, comercialmente viable, <strong>de</strong>dos brazos. El objetivo era suministrarterapia <strong>de</strong> movimientos tridimensionalespersonalizados <strong>de</strong> los miembrossuperiores para pacientes con hemiparesiaespástica y otras discapacida<strong>de</strong>sen los brazos. Los trabajos inicialesfueron cofinanciados por la ComisiónEuropea y por los participantes en elproyecto. El Consejo <strong>de</strong> InvestigaciónMédica <strong>de</strong> Hungría financió un proyectocomplementario.El sistema terapéutico REHAROBEl éxito comercial <strong>de</strong>l proyecto<strong>de</strong>pen<strong>de</strong>rá <strong>de</strong>l uso <strong>de</strong> subsistemasdisponibles en el mercado. Enconsecuencia, el sistema REHORABfue <strong>de</strong>sarrollado en torno a dos robotsindustriales <strong>ABB</strong> cooperativos quepodían programarse mediante una <strong>de</strong>mostración(entrada <strong>de</strong> instrucciones<strong>de</strong> enseñanza) utilizando mediciones<strong>de</strong> fuerza/par. Estos robots son manipuladoresreprogramables, capaces <strong>de</strong>mover una pieza o herramienta a lolargo <strong>de</strong> una trayectoria prescrita conuna velocidad y orientación <strong>de</strong>finidas.En su función terapéutica, sus capacida<strong>de</strong>spue<strong>de</strong>n servir para mover elbrazo <strong>de</strong> un paciente, pero en estecaso hay que tener muy en cuentauna complicación adicional: la seguridad<strong>de</strong>l paciente y <strong>de</strong>l operador. Poresta razón, los componentes elegidospara el sistema terapéutico REHAROBson dispositivos fabricados en serie,fiables y certificados; a<strong>de</strong>más elsistema fue complementado convarios dispositivos <strong>de</strong> seguridad redundantes.A<strong>de</strong>más <strong>de</strong> estas medidas,el equipo <strong>de</strong>l proyecto REHAROBredujo la máxima velocidad <strong>de</strong> losrobots, que pasó <strong>de</strong> 3 m/s a 0,25 m/s.22 Revista <strong>ABB</strong> 3/2006
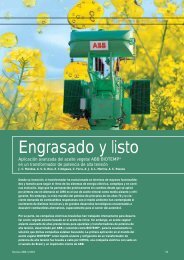
Robots para los pacientesIngenio en la medicinapeuta o <strong>de</strong>l sistema. La máquinarespon<strong>de</strong> <strong>de</strong>sconectando inmediatamenteel miembro <strong>de</strong>l paciente <strong>de</strong> losrobots, mientras continúa apoyándoloen las ortosis, según se muestra en 2b .La terapia mediante robots se configuraen tres fases principales: el fisioterapeutaprograma los robots <strong>de</strong>mostrandouna serie <strong>de</strong> ejercicios básicoshechos en presencia <strong>de</strong>l paciente. Acontinuación se editan los ejerciciosindividualmente, a<strong>de</strong>cuándolos a lasnecesida<strong>de</strong>s <strong>de</strong>l paciente, y se combinanpara producir un programa terapéuticocomplejo personalizado.Finalmente, los robots reproducen elprograma, permitiendo al fisioterapeutacambiar el or<strong>de</strong>n, la velocidad y elnúmero <strong>de</strong> repeticiones <strong>de</strong> cada fase3 . Puesto que el paciente está presentedurante la fase <strong>de</strong> programación,cada régimen terapéutico se ajustaperfectamente a sus necesida<strong>de</strong>s y elsistema terapéutico REHAROB pue<strong>de</strong>gestionar el programa sin la supervisiónpersonal <strong>de</strong>l cuadro médico.Los robots son productos muy flexibles,pero puesto que van fijados a laestructura <strong>de</strong>l sistema terapéutico ytrabajan en cooperación, existenciertos límites <strong>de</strong> peso y altura <strong>de</strong>lpaciente. Los pacientes no han <strong>de</strong>pesar más <strong>de</strong> 150 kg y han <strong>de</strong> teneruna altura <strong>de</strong> 160 a 190 cm. La limitación<strong>de</strong> la altura obe<strong>de</strong>ce a limitaciones<strong>de</strong> movimiento en los brazos <strong>de</strong>los robots, más que a motivos <strong>de</strong>seguridad: si el paciente es <strong>de</strong>masiadobajo o <strong>de</strong>masiado alto, los brazos <strong>de</strong>lrobot no podrán ejecutar con la<strong>de</strong>bida amplitud los movimientos <strong>de</strong>lprograma terapéutico. Tales problemasse i<strong>de</strong>ntificarán en la etapa <strong>de</strong>programación mediante una señal <strong>de</strong>‘articulación fuera <strong>de</strong> rango’ proporcionadaal terapeuta durante la entrada<strong>de</strong> instrucciones <strong>de</strong> enseñanza.sistema <strong>de</strong> fisioterapia robótica essegura y fiable, que los pacientes notienen miedo a los robots y que paralos fisioterapeutas es muy fácil apren<strong>de</strong>ra manejar el sistema. Doce participantes,que pa<strong>de</strong>cían diversos grados<strong>de</strong> discapacidad, fueron sometidos aun total combinado <strong>de</strong> 240 sesiones<strong>de</strong> fisioterapia mediante robots (20sesiones <strong>de</strong> treinta minutos cada uno).Todos los participantes mostraron unamejora significativa <strong>de</strong> su estado, <strong>de</strong>acuerdo con diversos indicadores <strong>de</strong><strong>de</strong>terioro y discapacidad1). A juicio <strong>de</strong>los pacientes, los ejercicios robóticoseran tan eficaces y relajantes como la2 Ortosis instrumentadas por el sistema terapéutico REHAROBa3 Interfaz hombre-máquina <strong>de</strong>l panel <strong>de</strong> operación REHAROBtradicional fisioterapia hecha por elfisioterapeuta en persona.Partiendo <strong>de</strong> las conclusiones <strong>de</strong>lprimer ensayo clínico, el proyectoFIZIOROBOT hizo <strong>de</strong>terminadasmodificaciones en el controlador <strong>de</strong>fuerza <strong>de</strong>l sistema, la interfaz gráfica<strong>de</strong> usuario, las ortosis instrumentadasy el dispositivo <strong>de</strong> habilitación <strong>de</strong>lpaciente (‘bloqueo <strong>de</strong> conductormuerto’). Para investigar la eficacia<strong>de</strong>l nuevo sistema se realizó un estudioclínico controlado sobre el FIZIO-ROBOT, siguiendo el mismo procedimientoético <strong>de</strong> aprobación empleadobEnsayos clínicosEn el Instituto Nacional <strong>de</strong> RehabilitaciónMédica <strong>de</strong> Budapest (hungría) serealizaron ensayos clínicos <strong>de</strong>l sistematerapéutico REHAROB, <strong>de</strong> conformidadcon lo estipulado por la Declaración<strong>de</strong> Helsinki [1] y por comitéslocales y nacionales <strong>de</strong> ética e investigacióncientífica. El primer ensayo,que tuvo una duración <strong>de</strong> cuatromeses, <strong>de</strong>mostró que la función <strong>de</strong>lRevista <strong>ABB</strong> 3/200623