

CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
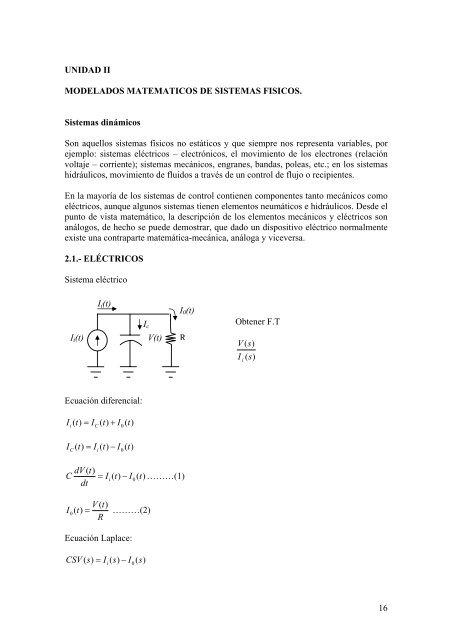
UNIDAD IIMODELADOS MATEMATICOS DE SISTEMAS FISICOS.Sistemas dinámicosSon aquellos sistemas físicos no estáticos y que siempre nos representa variables, porejemplo: sistemas eléctricos – electrónicos, el movimiento de los electrones (relaciónvoltaje – corriente); sistemas mecánicos, engranes, bandas, poleas, etc.; en los sistemashidráulicos, movimiento de fluidos a través de un control de flujo o recipientes.En la mayoría de los sistemas de control contienen componentes tanto mecánicos comoeléctricos, aunque algunos sistemas tienen elementos neumáticos e hidráulicos. Desde elpunto de vista matemático, la descripción de los elementos mecánicos y eléctricos sonanálogos, de hecho se puede demostrar, que dado un dispositivo eléctrico normalmenteexiste una contraparte matemática-mecánica, análoga y viceversa.2.1.- ELÉCTRICOSSistema eléctricoI i (t)I i (t)I cV(t)I 0 (t)RObtener F.TV ( s)I ( s)iEcuación diferencial:I ( t)= I ( t)I0(t)Ii C+C( t)= I ( t)− I0(t)idV ( t)C = Ii ( t)− I 0( t)………(1)dtV ( t)I0 ( t)= ………(2)REcuación Laplace:CSV ( s)= Ii ( s)− I0(s)16













