

CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
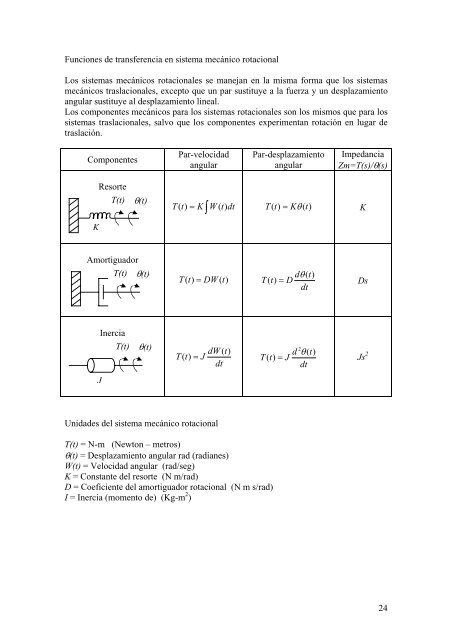
Funciones de transferencia en sistema mecánico rotacionalLos sistemas mecánicos rotacionales se manejan en la misma forma que los sistemasmecánicos traslacionales, excepto que un par sustituye a la fuerza y un desplazamientoangular sustituye al desplazamiento lineal.Los componentes mecánicos para los sistemas rotacionales son los mismos que para lossistemas traslacionales, salvo que los componentes experimentan rotación en lugar detraslación.ComponentesPar-velocidadangularPar-desplazamientoangularImpedanciaZm=T(s)/θ(s)KResorteT(t)θ(t)∫T ( t)= K W ( t)dt T ( t)= Kθ( t)KAmortiguadorT(t) θ(t)T ( t)= DW ( t)dθ( t)T ( t)= DDsdtInerciaT(t)θ(t)T ( t)= JdW ( t)dtd 2θ ( t)T ( t)= JJs 2dtJUnidades del sistema mecánico rotacionalT(t) = N-m (Newton – metros)θ(t) = Desplazamiento angular rad (radianes)W(t) = Velocidad angular (rad/seg)K = Constante del resorte (N m/rad)D = Coeficiente del amortiguador rotacional (N m s/rad)I = Inercia (momento de) (Kg-m 2 )24













