

CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
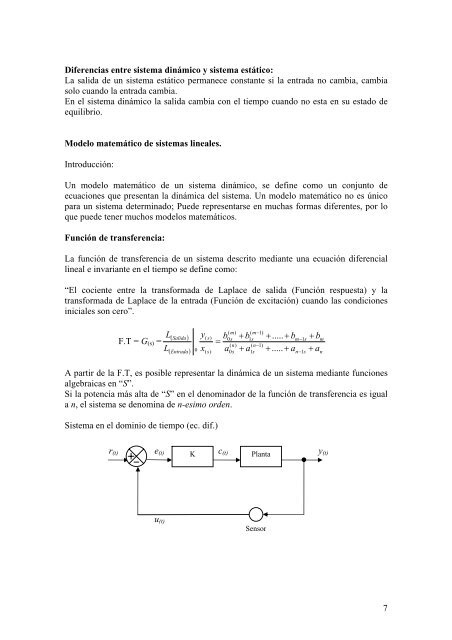
Diferencias entre sistema dinámico y sistema estático:La salida de un sistema estático permanece constante si la entrada no cambia, cambiasolo cuando la entrada cambia.En el sistema dinámico la salida cambia con el tiempo cuando no esta en su estado deequilibrio.Modelo matemático de sistemas lineales.Introducción:Un modelo matemático de un sistema dinámico, se define como un conjunto deecuaciones que presentan la dinámica del sistema. Un modelo matemático no es únicopara un sistema determinado; Puede representarse en muchas formas diferentes, por loque puede tener muchos modelos matemáticos.Función de transferencia:La función de transferencia de un sistema descrito mediante una ecuación diferenciallineal e invariante en el tiempo se define como:“El cociente entre la transformada de Laplace de salida (Función respuesta) y latransformada de Laplace de la entrada (Función de excitación) cuando las condicionesiniciales son cero”.LF.T = G (s) = ( Salida )L( m)( m−1)y(s)b0s+ b1s+ ..... + b=( n)( n−1)0 x a + a + ..... + am−1s+ b+ a( Entrada) ( s)0s1sn−1snA partir de la F.T, es posible representar la dinámica de un sistema mediante funcionesalgebraicas en “S”.Si la potencia más alta de “S” en el denominador de la función de transferencia es iguala n, el sistema se denomina de n-esimo orden.Sistema en el dominio de tiempo (ec. dif.)mr (t) e (t) K c (t) Plantay (t)u (t)Sensor7













