

CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
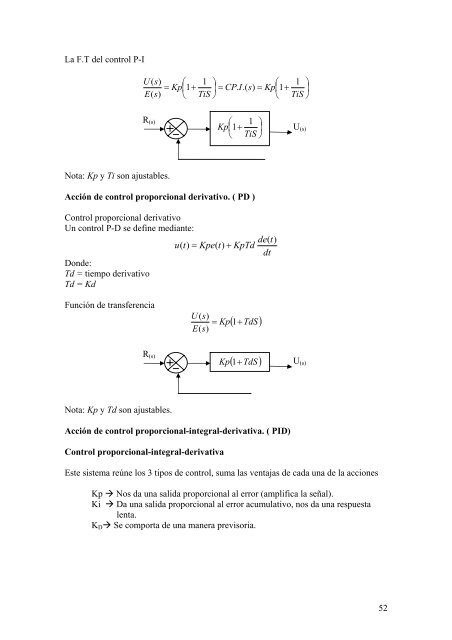
La F.T del control P-IU ( s)⎛ 1 ⎞⎛ 1= Kp⎜1+ ⎟ = CP.I.(s)= Kp⎜1+E(s)⎝ TiS ⎠⎝ TiS⎞⎟⎠R (s)⎛ 1Kp⎜1+⎝ TiS⎞⎟⎠U (s)Nota: Kp y Ti son ajustables.Acción de control proporcional derivativo. ( PD )Control proporcional derivativoUn control P-D se define mediante:Donde:Td = tiempo derivativoTd = Kdu( t)= Kpe(t)+ KpTdde(t)dtFunción de transferenciaU ( s)= Kp 1+E(s)( TdS )R (s)Kp ( 1 +TdS )U (s)Nota: Kp y Td son ajustables.Acción de control proporcional-integral-derivativa. ( PID)Control proporcional-integral-derivativaEste sistema reúne los 3 tipos de control, suma las ventajas de cada una de la accionesKp Nos da una salida proporcional al error (amplifica la señal).Ki Da una salida proporcional al error acumulativo, nos da una respuestalenta.K D Se comporta de una manera previsoria.52













