

CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
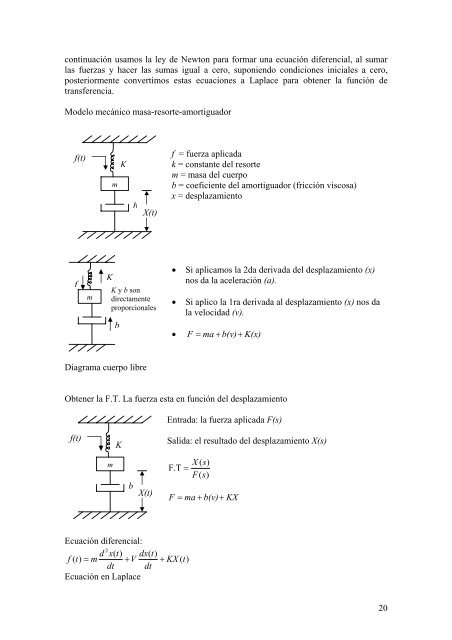
continuación usamos la ley de Newton para formar una ecuación diferencial, al sumarlas fuerzas y hacer las sumas igual a cero, suponiendo condiciones iniciales a cero,posteriormente convertimos estas ecuaciones a Laplace para obtener la función detransferencia.Modelo mecánico masa-resorte-amortiguadorf(t)mKbX(t)f = fuerza aplicadak = constante del resortem = masa del cuerpob = coeficiente del amortiguador (fricción viscosa)x = desplazamientofmKK y b sondirectamenteproporcionalesb• Si aplicamos la 2da derivada del desplazamiento (x)nos da la aceleración (a).• Si aplico la 1ra derivada al desplazamiento (x) nos dala velocidad (v).• F = ma + b(v) + K(x)Diagrama cuerpo libreObtener la F.T. La fuerza esta en función del desplazamientoEntrada: la fuerza aplicada F(s)f(t)KSalida: el resultado del desplazamiento X(s)mbX(t)X ( s)F.T =F(s)F = ma + b(v) + KXEcuación diferencial:2d x(t)dx(t)f ( t)= m + V + KX ( t)dt dtEcuación en Laplace20













