

CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
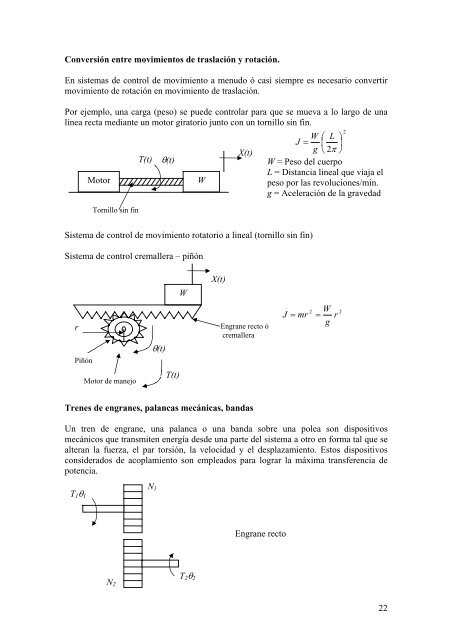
Conversión entre movimientos de traslación y rotación.En sistemas de control de movimiento a menudo ó casi siempre es necesario convertirmovimiento de rotación en movimiento de traslación.Por ejemplo, una carga (peso) se puede controlar para que se mueva a lo largo de unalínea recta mediante un motor giratorio junto con un tornillo sin fin.2W ⎛ L2 ⎟ ⎞J = ⎜X(t)g ⎝ π ⎠T(t) θ(t)W = Peso del cuerpoMotorWL = Distancia lineal que viaja elpeso por las revoluciones/min.g = Aceleración de la gravedadTornillo sin finSistema de control de movimiento rotatorio a lineal (tornillo sin fin)Sistema de control cremallera – piñónX(t)WrPiñónθ(t)Engrane recto ócremallera2J = mr =Wgr2Motor de manejoT(t)Trenes de engranes, palancas mecánicas, bandasUn tren de engrane, una palanca o una banda sobre una polea son dispositivosmecánicos que transmiten energía desde una parte del sistema a otro en forma tal que sealteran la fuerza, el par torsión, la velocidad y el desplazamiento. Estos dispositivosconsiderados de acoplamiento son empleados para lograr la máxima transferencia depotencia.T 1 θ 1N 1Engrane rectoN 2T 2 θ 222













