

CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
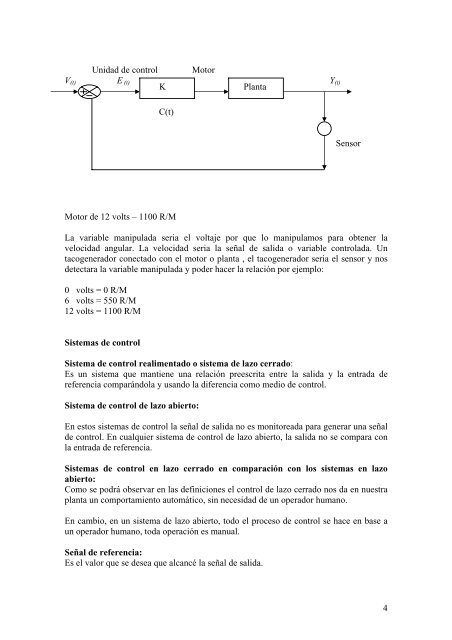
Unidad de control MotorV (t) E (t)KPlantaY (t)C(t)SensorMotor de 12 volts – 1100 R/MLa variable manipulada seria el voltaje por que lo manipulamos para obtener lavelocidad angular. La velocidad seria la señal de salida o variable controlada. Untacogenerador conectado con el motor o planta , el tacogenerador seria el sensor y nosdetectara la variable manipulada y poder hacer la relación por ejemplo:0 volts = 0 R/M6 volts = 550 R/M12 volts = 1100 R/MSistemas de controlSistema de control realimentado o sistema de lazo cerrado:Es un sistema que mantiene una relación preescrita entre la salida y la entrada dereferencia comparándola y usando la diferencia como medio de control.Sistema de control de lazo abierto:En estos sistemas de control la señal de salida no es monitoreada para generar una señalde control. En cualquier sistema de control de lazo abierto, la salida no se compara conla entrada de referencia.Sistemas de control en lazo cerrado en comparación con los sistemas en lazoabierto:Como se podrá observar en las definiciones el control de lazo cerrado nos da en nuestraplanta un comportamiento automático, sin necesidad de un operador humano.En cambio, en un sistema de lazo abierto, todo el proceso de control se hace en base aun operador humano, toda operación es manual.Señal de referencia:Es el valor que se desea que alcancé la señal de salida.4













