

CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
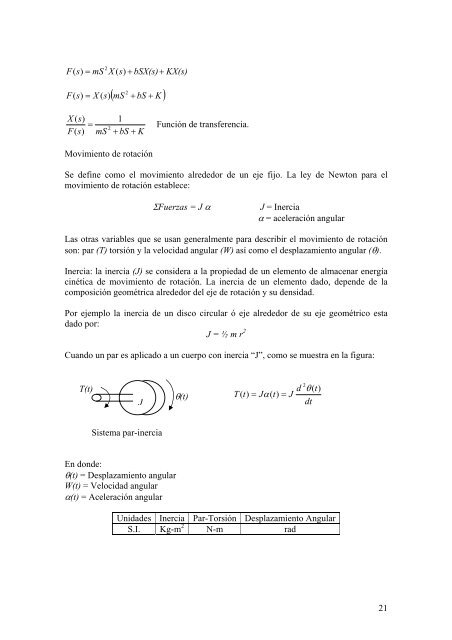
2F ( s)= mS X ( s) + bSX(s) + KX(s)2( mS + bS K )F ( s)= X ( s)+X ( s)F(s)=2mS1+ bS + KFunción de transferencia.Movimiento de rotaciónSe define como el movimiento alrededor de un eje fijo. La ley de Newton para elmovimiento de rotación establece:ΣFuerzas = J αJ = Inerciaα = aceleración angularLas otras variables que se usan generalmente para describir el movimiento de rotaciónson: par (T) torsión y la velocidad angular (W) así como el desplazamiento angular (θ).Inercia: la inercia (J) se considera a la propiedad de un elemento de almacenar energíacinética de movimiento de rotación. La inercia de un elemento dado, depende de lacomposición geométrica alrededor del eje de rotación y su densidad.Por ejemplo la inercia de un disco circular ó eje alrededor de su eje geométrico estadado por:J = ½ m r 2Cuando un par es aplicado a un cuerpo con inercia “J”, como se muestra en la figura:T(t)Jθ(t)T ( t)= Jα ( t)= Jd2θdt( t)Sistema par-inerciaEn donde:θ(t) = Desplazamiento angularW(t) = Velocidad angularα(t) = Aceleración angularUnidades Inercia Par-Torsión Desplazamiento AngularS.I. Kg-m 2 N-m rad21













