

CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul
SHOW LESS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
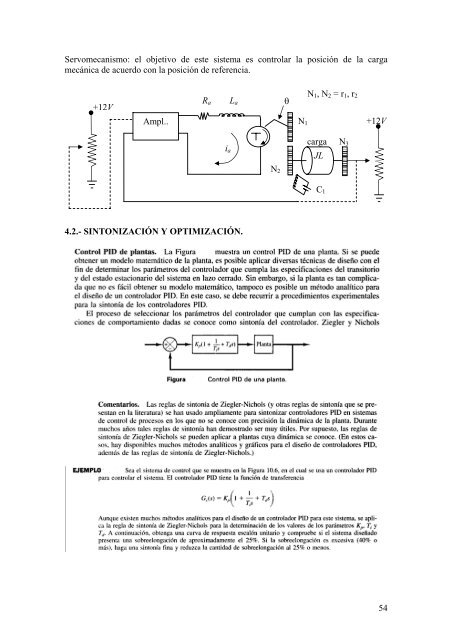
Servomecanismo: el objetivo de este sistema es controlar la posición de la cargamecánica de acuerdo con la posición de referencia.+12VAmpl..R aL aθN 1N 1 , N 2 = r 1 , r 2+12Vi aN 2cargaJLC 1N 34.2.- SINTONIZACIÓN Y OPTIMIZACIÓN.54













