

CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
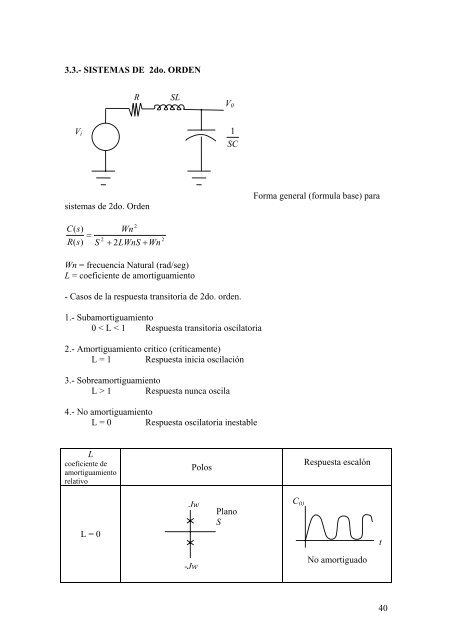
3.3.- SISTEMAS DE 2do. ORDENRSLV 0V i1SCsistemas de 2do. OrdenForma general (formula base) paraC(s)=R(s)S2Wn+ 2LWnS+ Wn22Wn = frecuencia Natural (rad/seg)L = coeficiente de amortiguamiento- Casos de la respuesta transitoria de 2do. orden.1.- Subamortiguamiento0 < L < 1 Respuesta transitoria oscilatoria2.- Amortiguamiento critico (críticamente)L = 1 Respuesta inicia oscilación3.- SobreamortiguamientoL > 1 Respuesta nunca oscila4.- No amortiguamientoL = 0 Respuesta oscilatoria inestableLcoeficiente deamortiguamientorelativoPolosRespuesta escalónL = 0Jw-JwPlanoSC (t)No amortiguadot40













