

CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul
CUAD. CONTROL I.pdf - Profe Saul

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
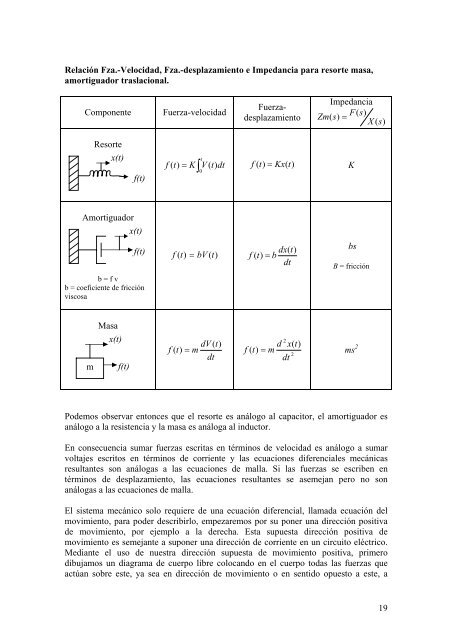
Relación Fza.-Velocidad, Fza.-desplazamiento e Impedancia para resorte masa,amortiguador traslacional.ComponenteFuerza-velocidadFuerzadesplazamientoImpedanciaZm ( s)=F(s)X ( s)Resortex(t)f(t)∫tf ( t)= K V ( t)dt f ( t)= Kx(t)K0Amortiguadorx(t)f(t)f ( t)= bV ( t)dx(t)f ( t)= bdtbsB = fricciónb = f vb = coeficiente de fricciónviscosamMasax(t)f(t)2dV ( t)d x(t)f ( t)= mf ( t)= mms 22dtdtPodemos observar entonces que el resorte es análogo al capacitor, el amortiguador esanálogo a la resistencia y la masa es análoga al inductor.En consecuencia sumar fuerzas escritas en términos de velocidad es análogo a sumarvoltajes escritos en términos de corriente y las ecuaciones diferenciales mecánicasresultantes son análogas a las ecuaciones de malla. Si las fuerzas se escriben entérminos de desplazamiento, las ecuaciones resultantes se asemejan pero no sonanálogas a las ecuaciones de malla.El sistema mecánico solo requiere de una ecuación diferencial, llamada ecuación delmovimiento, para poder describirlo, empezaremos por su poner una dirección positivade movimiento, por ejemplo a la derecha. Esta supuesta dirección positiva demovimiento es semejante a suponer una dirección de corriente en un circuito eléctrico.Mediante el uso de nuestra dirección supuesta de movimiento positiva, primerodibujamos un diagrama de cuerpo libre colocando en el cuerpo todas las fuerzas queactúan sobre este, ya sea en dirección de movimiento o en sentido opuesto a este, a19













