Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Strana 18<br />
Analýza a syntéza<br />
2. Je zadána část struktury i část parametrů regulačního obvodu<br />
3. Je plně zadána struktura a jsou zadány některé parametry regulačního obvodu<br />
S případem 1 se v praxi setkáváme zřídka. Vyskytuje se např. při syntéze filtrů.<br />
Prakticky všechny úlohy syntézy regulačního obvodu lze zahrnout pod body 2 a 3.<br />
Pod bod 3 patří velké množství průmyslových regulací, u kterých lze regulační<br />
obvod rozdělit na regulátor a regulovaný systém. Regulátory pro průmyslové regulace se<br />
vyrábějí jako univerzální regulátory s pevnou strukturou - obvykle spojitý regulátor PID.<br />
Úloha syntézy se zde redukuje pouze na určení nastavitelných parametrů regulátoru.<br />
Vhodnost správné volby typu regulátoru ověříme po provedené syntéze regulačního<br />
obvodu jeho simulací na matematickém modelu regulačního obvodu a později provozními<br />
zkouškami na regulovaném objektu přímo v provozu.<br />
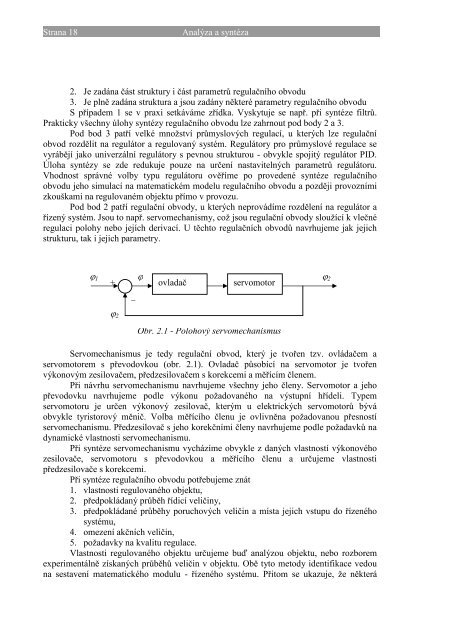
Pod bod 2 patří regulační obvody, u kterých neprovádíme rozdělení na regulátor a<br />
řízený systém. Jsou to např. servomechanismy, což jsou regulační obvody sloužící k vlečné<br />
regulaci polohy nebo jejích derivací. U těchto regulačních obvodů navrhujeme jak jejich<br />
strukturu, tak i jejich parametry.<br />
ϕ 1<br />
+<br />
ϕ<br />
ovladač<br />
servomotor<br />
ϕ 2<br />
−<br />
ϕ 2<br />
Obr. 2.1 - Polohový servomechanismus<br />
Servomechanismus je tedy regulační obvod, který je tvořen tzv. ovládačem a<br />
servomotorem s převodovkou (obr. 2.1). Ovladač působící na servomotor je tvořen<br />
výkonovým zesilovačem, předzesilovačem s korekcemi a měřícím členem.<br />
Při návrhu servomechanismu navrhujeme všechny jeho členy. Servomotor a jeho<br />
převodovku navrhujeme podle výkonu požadovaného na výstupní hřídeli. Typem<br />
servomotoru je určen výkonový zesilovač, kterým u elektrických servomotorů bývá<br />
obvykle tyristorový měnič. Volba měřícího členu je ovlivněna požadovanou přesností<br />
servomechanismu. Předzesilovač s jeho korekčními členy navrhujeme podle požadavků na<br />
dynamické vlastnosti servomechanismu.<br />
Při syntéze servomechanismu vycházíme obvykle z daných vlastností výkonového<br />
zesilovače, servomotoru s převodovkou a měřícího členu a určujeme vlastnosti<br />
předzesilovače s korekcemi.<br />
Při syntéze regulačního obvodu potřebujeme znát<br />
1. vlastnosti regulovaného objektu,<br />
2. předpokládaný průběh řídicí veličiny,<br />
3. předpokládané průběhy poruchových veličin a místa jejich vstupu do řízeného<br />
systému,<br />
4. omezení akčních veličin,<br />
5. požadavky na kvalitu regulace.<br />
Vlastnosti regulovaného objektu určujeme buď analýzou objektu, nebo rozborem<br />
experimentálně získaných průběhů veličin v objektu. Obě tyto metody identifikace vedou<br />
na sestavení matematického modulu - řízeného systému. Přitom se ukazuje, že některá