Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Použití frekvenčních charakteristik u diskrétních systémů Strana 51<br />
4.2.3 Nyquistovo kritérium<br />
Z frekvenčních kritérií se u spojitých systémů nejčastěji používá kritérium<br />
Nyquistovo. Také diskrétní regulační obvody se mohou pyšnit tímto kritériem, nicméně se<br />
diskrétní verze Nyquistova kritéria stability používání spíše zřídka, protože je k výpočtu a<br />
konstrukci křivek zapotřebí vhodný software. Ten ovšem není podmínkou, ale bez něj se<br />
stává výpočet příliš pracný. Proto zde řešení Nyquistova kritéria jen nastíním.<br />
Jedná se pochopitelně o frekvenční charakteristiku rozpojeného obvodu,<br />
sestrojovanou pro bezrozměrnou frekvenci ωT od 0 do π, protože pak je od π do 2π<br />
symetrická podle reálné osy a dál se její průběh periodicky opakuje.<br />
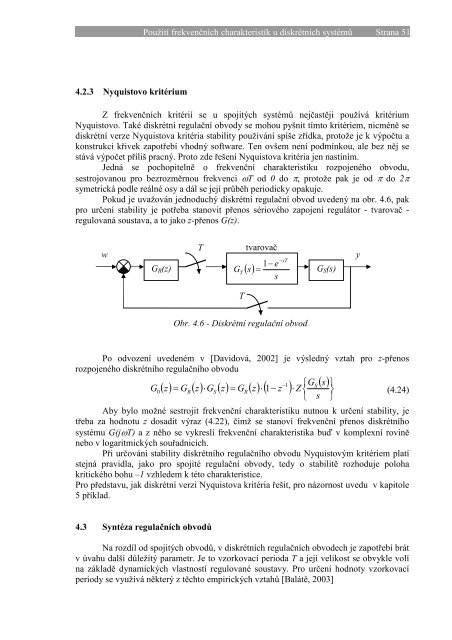
Pokud je uvažován jednoduchý diskrétní regulační obvod uvedený na obr. 4.6, pak<br />
pro určení stability je potřeba stanovit přenos sériového zapojení regulátor - tvarovač -<br />
regulovaná soustava, a to jako z-přenos G(z).<br />
w<br />
G R (z)<br />
T<br />
G<br />
T<br />
tvarovač<br />
( s)<br />
e<br />
= 1−<br />
s<br />
−sT<br />
G S (s)<br />
y<br />
T<br />
Obr. 4.6 - Diskrétní regulační obvod<br />
Po odvození uvedeném v [Davidová, 2002] je výsledný vztah pro z-přenos<br />
rozpojeného diskrétního regulačního obvodu<br />
−1<br />
⎧GS<br />
( ) ( ) ( ) ( ) ( )<br />
( s)<br />
⎫<br />
G0 z = GR<br />
z ⋅GS<br />
z = GR<br />
z ⋅ 1−<br />
z ⋅ Z⎨<br />
⎬<br />
(4.24)<br />
⎩ s ⎭<br />
Aby bylo možné sestrojit frekvenční charakteristiku nutnou k určení stability, je<br />
třeba za hodnotu z dosadit výraz (4.22), čímž se stanoví frekvenční přenos diskrétního<br />
systému G(jωT) a z něho se vykreslí frekvenční charakteristika buď v komplexní rovině<br />
nebo v logaritmických souřadnicích.<br />
Při určováni stability diskrétního regulačního obvodu Nyquistovým kritériem platí<br />
stejná pravidla, jako pro spojité regulační obvody, tedy o stabilitě rozhoduje poloha<br />
kritického bohu –1 vzhledem k této charakteristice.<br />
Pro představu, jak diskrétní verzi Nyquistova kritéria řešit, pro názornost uvedu v kapitole<br />
5 příklad.<br />
4.3 Syntéza regulačních obvodů<br />
Na rozdíl od spojitých obvodů, v diskrétních regulačních obvodech je zapotřebí brát<br />
v úvahu další důležitý parametr. Je to vzorkovací perioda T a její velikost se obvykle volí<br />
na základě dynamických vlastností regulované soustavy. Pro určení hodnoty vzorkovací<br />
periody se využívá některý z těchto empirických vztahů [Balátě, 2003]