Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Strana 21<br />
3 POUŽITÍ FREKVENČNÍCH CHARAKTERISTIK U<br />
SPOJITÝCH SYSTÉMŮ<br />
K řízení reálných objektů se rozvíjí metody automatické regulace. Aby tyto metody<br />
byly použitelné pro širokou třídu reálných objektů, jsou vytvořeny abstraktní modely<br />
reálných objektů, které se nazývají systémy. Abstrakcí velmi široké třídy reálných modelů<br />
vznikly spojité systémy, u nichž jsou všechny veličiny funkcemi času t. [Kubík, 1982]<br />
3.1 Frekvenční popis spojitých systémů<br />
V této části třetí kapitoly se budu zabývat frekvenčním popisem spojitých<br />
regulačních obvodů. Vysvětlím zde, které pojmy a výpočtové vztahy využiji při analýze a<br />
syntéze regulačních obvodů. Důležité rovněž bude ukázat si postup při konstrukci<br />
frekvenčních charakteristik.<br />
3.1.1 Frekvenční přenos<br />
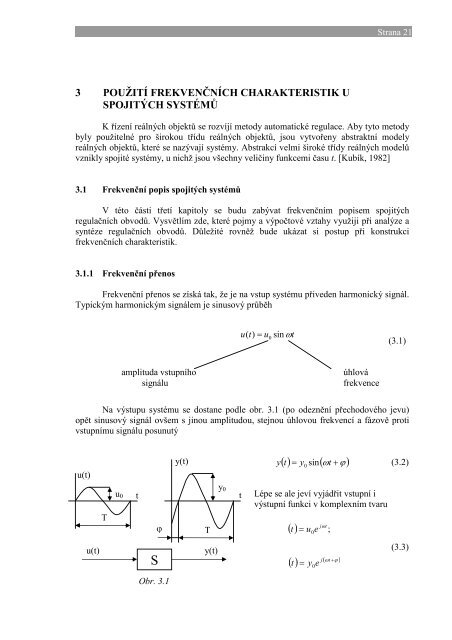
Frekvenční přenos se získá tak, že je na vstup systému přiveden harmonický signál.<br />
Typickým harmonickým signálem je sinusový průběh<br />
u t)<br />
= u sin ωt<br />
(<br />
0<br />
(3.1)<br />
amplituda vstupního<br />
signálu<br />
úhlová<br />
frekvence<br />
Na výstupu systému se dostane podle obr. 3.1 (po odeznění přechodového jevu)<br />
opět sinusový signál ovšem s jinou amplitudou, stejnou úhlovou frekvencí a fázově proti<br />
vstupnímu signálu posunutý<br />
u(t)<br />
y(t)<br />
y<br />
( t) = y sin( ω t + ϕ )<br />
0<br />
(3.2)<br />
T<br />
u 0<br />
t<br />
ϕ<br />
T<br />
y 0<br />
t<br />
Lépe se ale jeví vyjádřit vstupní i<br />
výstupní funkci v komplexním tvaru<br />
jωt<br />
( t) = u e ;<br />
0<br />
u(t)<br />
S<br />
y(t)<br />
j ( ω t +ϕ )<br />
( )<br />
t = y0e<br />
(3.3)<br />
Obr. 3.1