Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Strana 64<br />
Použití vybraných metod na příkladech<br />
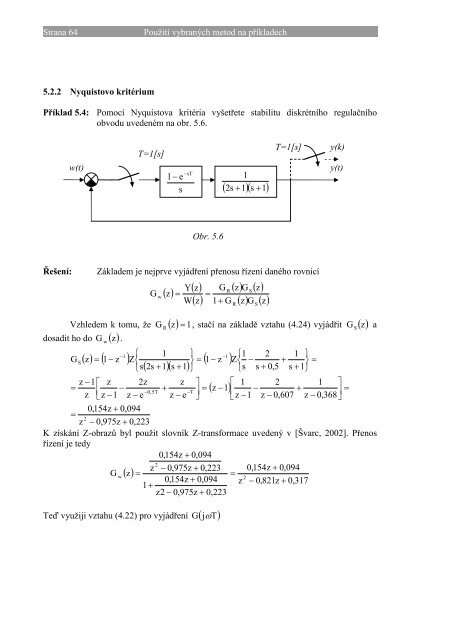
5.2.2 Nyquistovo kritérium<br />
Příklad 5.4: Pomocí Nyquistova kritéria vyšetřete stabilitu diskrétního regulačního<br />
obvodu uvedeném na obr. 5.6.<br />
w(t)<br />
T=1[s]<br />
1−<br />
e<br />
s<br />
−sT<br />
1<br />
( 2s + 1)( s + 1)<br />
T=1[s]<br />
y(k)<br />
y(t)<br />
Obr. 5.6<br />
Řešení:<br />
Základem je nejprve vyjádření přenosu řízení daného rovnicí<br />
G<br />
w<br />
( z)<br />
( )<br />
( )<br />
Y z<br />
=<br />
W z<br />
G<br />
R<br />
=<br />
1+<br />
G<br />
( z) G<br />
S<br />
( z)<br />
( z) G ( z)<br />
R<br />
S<br />
Vzhledem k tomu, že G R<br />
( z) = 1, stačí na základě vztahu (4.24) vyjádřit ( z)<br />
dosadit ho do G w<br />
( z)<br />
.<br />
G<br />
S<br />
−1<br />
( z) = ( 1−<br />
z )<br />
⎧<br />
Z⎨<br />
⎩s<br />
1<br />
( 2s + 1)( s + 1)<br />
⎫<br />
⎬ =<br />
⎭<br />
−1<br />
( 1−<br />
z )<br />
⎧1<br />
2 1 ⎫<br />
Z⎨<br />
− + ⎬ =<br />
⎩s<br />
s + 0,5 s + 1⎭<br />
G S<br />
a<br />
z −1<br />
⎡ z 2z z ⎤ ⎡ 1 2 1 ⎤<br />
=<br />
( z 1)<br />
z ⎢<br />
− + = −<br />
0,5T<br />
T<br />
z 1 z e z e<br />
⎢ − + =<br />
−<br />
− ⎥ z 1 z 0,607 z 0,368<br />
⎥<br />
⎣ − − − ⎦ ⎣ − − − ⎦<br />
0,154z + 0,094<br />
=<br />
2<br />
z − 0,975z + 0,223<br />
K získání Z-obrazů byl použit slovník Z-transformace uvedený v [Švarc, 2002]. Přenos<br />
řízení je tedy<br />
0,154z + 0,094<br />
2<br />
z − 0,975z + 0,223 0,154z + 0,094<br />
G<br />
w<br />
( z)<br />
=<br />
=<br />
2<br />
0,154z + 0,094 z − 0,821z + 0,317<br />
1+<br />
z2 − 0,975z + 0,223<br />
Teď využiji vztahu (4.22) pro vyjádření G( jω<br />
T)