Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Použití vybraných metod na příkladech Strana 63<br />
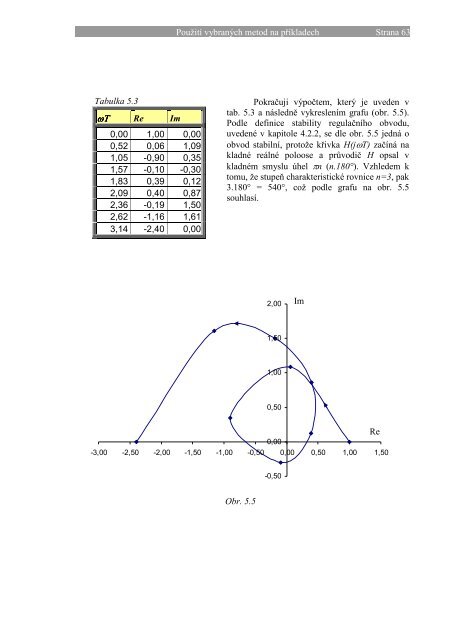
Tabulka 5.3<br />
ωΤ Re Im<br />
0,00 1,00 0,00<br />
0,52 0,06 1,09<br />
1,05 -0,90 0,35<br />
1,57 -0,10 -0,30<br />
1,83 0,39 0,12<br />
2,09 0,40 0,87<br />
2,36 -0,19 1,50<br />
2,62 -1,16 1,61<br />
3,14 -2,40 0,00<br />
Pokračuji výpočtem, který je uveden v<br />
tab. 5.3 a následně vykreslením grafu (obr. 5.5).<br />
Podle definice stability regulačního obvodu,<br />
uvedené v kapitole 4.2.2, se dle obr. 5.5 jedná o<br />
obvod stabilní, protože křivka H(jωT) začíná na<br />
kladné reálné poloose a průvodič H opsal v<br />
kladném smyslu úhel πn (n.180°). Vzhledem k<br />
tomu, že stupeň charakteristické rovnice n=3, pak<br />
3.180° = 540°, což podle grafu na obr. 5.5<br />
souhlasí.<br />
2,00<br />
Im<br />
1,50<br />
1,00<br />
0,50<br />
-3,00 -2,50 -2,00 -1,50 -1,00 -0,50 0,00 0,50 1,00 1,50<br />
0,00<br />
Re<br />
-0,50<br />
Obr. 5.5