Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
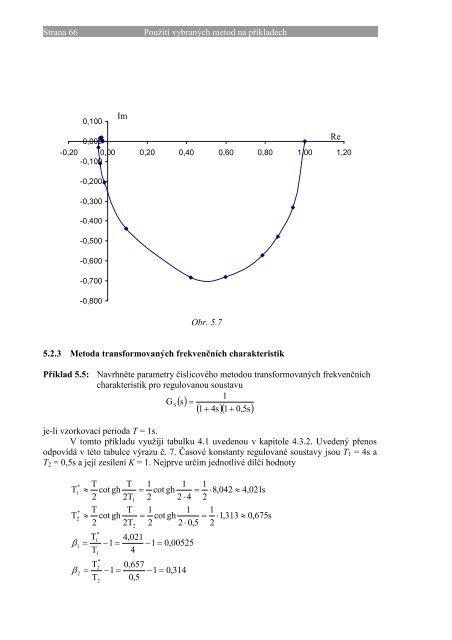
Strana 66<br />
Použití vybraných metod na příkladech<br />
0,100<br />
Im<br />
0,000<br />
Re<br />
-0,20 0,00 0,20 0,40 0,60 0,80 1,00 1,20<br />
-0,100<br />
-0,200<br />
-0,300<br />
-0,400<br />
-0,500<br />
-0,600<br />
-0,700<br />
-0,800<br />
Obr. 5.7<br />
5.2.3 Metoda transformovaných frekvenčních charakteristik<br />
Příklad 5.5: Navrhněte parametry číslicového metodou transformovaných frekvenčních<br />
charakteristik pro regulovanou soustavu<br />
1<br />
G S<br />
( s)<br />
=<br />
1+<br />
4s 1+<br />
0,5s<br />
( )( )<br />
je-li vzorkovací perioda T = 1s.<br />
V tomto příkladu využiji tabulku 4.1 uvedenou v kapitole 4.3.2. Uvedený přenos<br />
odpovídá v této tabulce výrazu č. 7. Časové konstanty regulované soustavy jsou T 1 = 4s a<br />
T 2 = 0,5s a její zesílení K = 1. Nejprve určím jednotlivé dílčí hodnoty<br />
* T T 1 1 1<br />
T1 ≈ cot gh = cot gh = ⋅8,042<br />
≈ 4,021s<br />
2 2T1<br />
2 2 ⋅ 4 2<br />
* T T 1 1 1<br />
T2 ≈ cot gh = cot gh = ⋅1,313<br />
≈ 0,675s<br />
2 2T 2 2 ⋅ 0,5 2<br />
*<br />
T1<br />
4,021<br />
β<br />
1<br />
= −1<br />
= −1<br />
= 0,00525<br />
T 4<br />
1<br />
*<br />
T2<br />
0,657<br />
β<br />
2<br />
= −1<br />
= −1<br />
= 0,314<br />
T 0,5<br />
2<br />
2