Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Použití frekvenčních charakteristik u spojitých systémů Strana 37<br />
y(t)<br />
+5% y(∞)<br />
y(∞)<br />
y max<br />
T<br />
–5% y(∞)<br />
t max<br />
t<br />
t r<br />
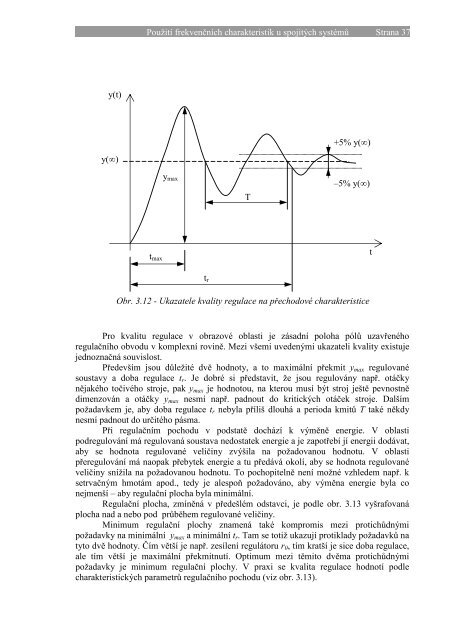
Obr. 3.12 - Ukazatele kvality regulace na přechodové charakteristice<br />
Pro kvalitu regulace v obrazové oblasti je zásadní poloha pólů uzavřeného<br />
regulačního obvodu v komplexní rovině. Mezi všemi uvedenými ukazateli kvality existuje<br />
jednoznačná souvislost.<br />
Především jsou důležité dvě hodnoty, a to maximální překmit y max regulované<br />
soustavy a doba regulace t r . Je dobré si představit, že jsou regulovány např. otáčky<br />
nějakého točivého stroje, pak y max je hodnotou, na kterou musí být stroj ještě pevnostně<br />
dimenzován a otáčky y max nesmí např. padnout do kritických otáček stroje. Dalším<br />
požadavkem je, aby doba regulace t r nebyla příliš dlouhá a perioda kmitů T také někdy<br />
nesmí padnout do určitého pásma.<br />
Při regulačním pochodu v podstatě dochází k výměně energie. V oblasti<br />
podregulování má regulovaná soustava nedostatek energie a je zapotřebí jí energii dodávat,<br />
aby se hodnota regulované veličiny zvýšila na požadovanou hodnotu. V oblasti<br />
přeregulování má naopak přebytek energie a tu předává okolí, aby se hodnota regulované<br />
veličiny snížila na požadovanou hodnotu. To pochopitelně není možné vzhledem např. k<br />
setrvačným hmotám apod., tedy je alespoň požadováno, aby výměna energie byla co<br />
nejmenší – aby regulační plocha byla minimální.<br />
Regulační plocha, zmíněná v předešlém odstavci, je podle obr. 3.13 vyšrafovaná<br />
plocha nad a nebo pod průběhem regulované veličiny.<br />
Minimum regulační plochy znamená také kompromis mezi protichůdnými<br />
požadavky na minimální y max a minimální t r . Tam se totiž ukazují protiklady požadavků na<br />
tyto dvě hodnoty. Čím větší je např. zesílení regulátoru r 0 , tím kratší je sice doba regulace,<br />
ale tím větší je maximální překmitnutí. Optimum mezi těmito dvěma protichůdnými<br />
požadavky je minimum regulační plochy. V praxi se kvalita regulace hodnotí podle<br />
charakteristických parametrů regulačního pochodu (viz obr. 3.13).