Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Strana 26<br />
Použití frekvenčních charakteristik u spojitých systémů<br />
3.2 Analýza spojitých systémů frekvenčními metodami<br />
V této kapitole budou analyzovány vlastnosti spojitých řízených systémů. Budou<br />
analyzovány různé popisy řízených systémů a uvedu zde některé metody určení vlastností<br />
a stability systému. Nejprve zde vysvětlím pojem stabilita regulačního obvodu a poté se<br />
zaměřím na jednotlivá kritéria stability.<br />
3.2.1 Stabilita regulačních obvodů<br />
Stabilita je jedním ze základních požadavků, které se kladou na regulační obvod.<br />
Regulační obvod je stabilní, jestliže po vychýlení regulačního obvodu z rovnovážného<br />
stavu a odeznění vnějších sil, které tuto odchylku způsobily, se regulační obvod během<br />
času znovu vrátí do původního rovnovážného stavu. Jinak řečeno je stabilita vlastnost<br />
regulačního obvodu udržet se v okolí rovnovážného stavu nebo se do něj vrátit po<br />
odeznění vnějších působících sil.<br />
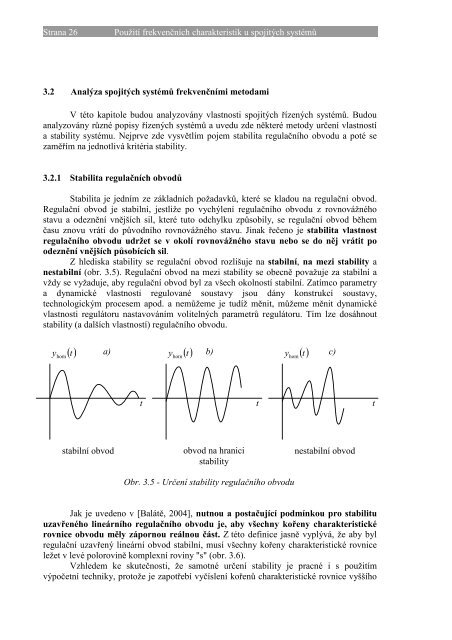
Z hlediska stability se regulační obvod rozlišuje na stabilní, na mezi stability a<br />
nestabilní (obr. 3.5). Regulační obvod na mezi stability se obecně považuje za stabilní a<br />
vždy se vyžaduje, aby regulační obvod byl za všech okolností stabilní. Zatímco parametry<br />
a dynamické vlastnosti regulované soustavy jsou dány konstrukcí soustavy,<br />
technologickým procesem apod. a nemůžeme je tudíž měnit, můžeme měnit dynamické<br />
vlastnosti regulátoru nastavováním volitelných parametrů regulátoru. Tím lze dosáhnout<br />
stability (a dalších vlastností) regulačního obvodu.<br />
y hom<br />
( t)<br />
y hom<br />
( t)<br />
( t)<br />
a) b) c)<br />
y hom<br />
t<br />
t<br />
t<br />
stabilní obvod<br />
obvod na hranici<br />
stability<br />
nestabilní obvod<br />
Obr. 3.5 - Určení stability regulačního obvodu<br />
Jak je uvedeno v [Balátě, 2004], nutnou a postačující podmínkou pro stabilitu<br />
uzavřeného lineárního regulačního obvodu je, aby všechny kořeny charakteristické<br />
rovnice obvodu měly zápornou reálnou část. Z této definice jasně vyplývá, že aby byl<br />
regulační uzavřený lineární obvod stabilní, musí všechny kořeny charakteristické rovnice<br />
ležet v levé polorovině komplexní roviny "s" (obr. 3.6).<br />
Vzhledem ke skutečnosti, že samotné určení stability je pracné i s použitím<br />
výpočetní techniky, protože je zapotřebí vyčíslení kořenů charakteristické rovnice vyššího