Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...
Diplomová práce - Ãstav automatizace a informatiky - Vysoké uÄenà ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Použití frekvenčních charakteristik u diskrétních systémů Strana 47<br />
Ω = tg ωT<br />
2<br />
(4.9)<br />
a frekvenčnímu rozsahu ω T ∈< 0,<br />
π > odpovídá frekvenční rozsah modifikované<br />
frekvence Ω ∈< 0 , ∞ > .<br />
4.2 Analýza diskrétních systémů frekvenčními metodami<br />
V této kapitole budou analyzovány vlastnosti diskrétních systémů. Stejně jako u<br />
spojitých sytému, analýza diskrétních systémů se orientuje na stabilitu regulačního obvodu.<br />
Budou analyzovány různé popisy řízených systémů a uvedu zde některé metody určení<br />
vlastností a stability systému.<br />
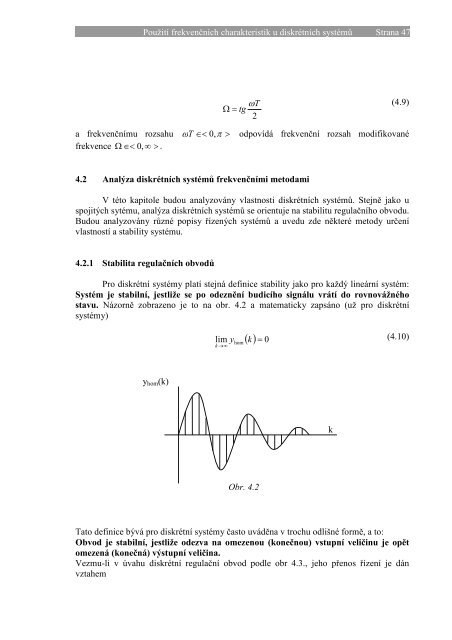
4.2.1 Stabilita regulačních obvodů<br />
Pro diskrétní systémy platí stejná definice stability jako pro každý lineární systém:<br />
Systém je stabilní, jestliže se po odeznění budicího signálu vrátí do rovnovážného<br />
stavu. Názorně zobrazeno je to na obr. 4.2 a matematicky zapsáno (už pro diskrétní<br />
systémy)<br />
( k ) 0<br />
lim y hom<br />
=<br />
k →∞<br />
(4.10)<br />
y hom (k)<br />
k<br />
Obr. 4.2<br />
Tato definice bývá pro diskrétní systémy často uváděna v trochu odlišné formě, a to:<br />
Obvod je stabilní, jestliže odezva na omezenou (konečnou) vstupní veličinu je opět<br />
omezená (konečná) výstupní veličina.<br />
Vezmu-li v úvahu diskrétní regulační obvod podle obr 4.3., jeho přenos řízení je dán<br />
vztahem