

Diplomarbeit - Hochschule für Technik und Wirtschaft Dresden
Diplomarbeit - Hochschule für Technik und Wirtschaft Dresden
Diplomarbeit - Hochschule für Technik und Wirtschaft Dresden

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Diplomarbeit</strong>: Modulares System Testen der Steuerungsskripte im Simulator<br />
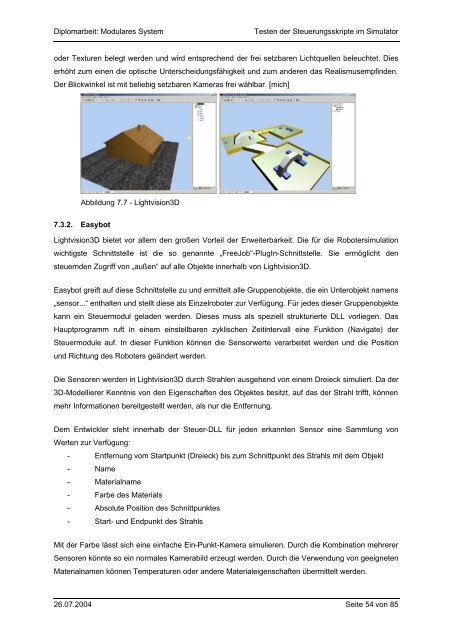
oder Texturen belegt werden <strong>und</strong> wird entsprechend der frei setzbaren Lichtquellen beleuchtet. Dies<br />
erhöht zum einen die optische Unterscheidungsfähigkeit <strong>und</strong> zum anderen das Realismusempfinden.<br />
Der Blickwinkel ist mit beliebig setzbaren Kameras frei wählbar. [mich]<br />
Abbildung 7.7 - Lightvision3D<br />
7.3.2. Easybot<br />
Lightvision3D bietet vor allem den großen Vorteil der Erweiterbarkeit. Die <strong>für</strong> die Robotersimulation<br />
wichtigste Schnittstelle ist die so genannte „FreeJob“-PlugIn-Schnittstelle. Sie ermöglicht den<br />
steuernden Zugriff von „außen“ auf alle Objekte innerhalb von Lightvision3D.<br />
Easybot greift auf diese Schnittstelle zu <strong>und</strong> ermittelt alle Gruppenobjekte, die ein Unterobjekt namens<br />
„sensor...“ enthalten <strong>und</strong> stellt diese als Einzelroboter zur Verfügung. Für jedes dieser Gruppenobjekte<br />
kann ein Steuermodul geladen werden. Dieses muss als speziell strukturierte DLL vorliegen. Das<br />
Hauptprogramm ruft in einem einstellbaren zyklischen Zeitintervall eine Funktion (Navigate) der<br />
Steuermodule auf. In dieser Funktion können die Sensorwerte verarbeitet werden <strong>und</strong> die Position<br />
<strong>und</strong> Richtung des Roboters geändert werden.<br />
Die Sensoren werden in Lightvision3D durch Strahlen ausgehend von einem Dreieck simuliert. Da der<br />
3D-Modellierer Kenntnis von den Eigenschaften des Objektes besitzt, auf das der Strahl trifft, können<br />
mehr Informationen bereitgestellt werden, als nur die Entfernung.<br />
Dem Entwickler steht innerhalb der Steuer-DLL <strong>für</strong> jeden erkannten Sensor eine Sammlung von<br />
Werten zur Verfügung:<br />
- Entfernung vom Startpunkt (Dreieck) bis zum Schnittpunkt des Strahls mit dem Objekt<br />
- Name<br />
- Materialname<br />
- Farbe des Materials<br />
- Absolute Position des Schnittpunktes<br />
- Start- <strong>und</strong> Endpunkt des Strahls<br />
Mit der Farbe lässt sich eine einfache Ein-Punkt-Kamera simulieren. Durch die Kombination mehrerer<br />
Sensoren könnte so ein normales Kamerabild erzeugt werden. Durch die Verwendung von geeigneten<br />
Materialnamen können Temperaturen oder andere Materialeigenschaften übermittelt werden.<br />
26.07.2004 Seite 54 von 85














