

The Development of Neural Network Based System Identification ...
The Development of Neural Network Based System Identification ...
The Development of Neural Network Based System Identification ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
186 CHAPTER 7 FLIGHT CONTROL SYSTEM DESIGN: RESULTS AND DISCUSSION<br />
• <strong>The</strong> mathematical calculations that can be done without iterations or involve a<br />
predetermined matrix size are placed outside processing loops as much as possible<br />
to reduce the computation overhead.<br />
• <strong>The</strong> debugging option is disabled in the program to reduce overhead.<br />
• Input constraints are only imposed on the first sample <strong>of</strong> the control horizon to<br />
reduce computational efforts. <strong>The</strong>re is no significant performance improvement<br />
obtained from imposing constraints on all control sequence as confirmed in Wang<br />
[2009a].<br />
7.3 EXPERIMENTAL RESULTS<br />
This section presents the control experimental results for the unmanned helicopter<br />
system. <strong>The</strong> first part <strong>of</strong> the experiments is conducted to identify and demonstrate<br />
the effect <strong>of</strong> tuning parameters on the NNAPC flight controller performance. <strong>The</strong><br />
tuning parameters are identified only in the pitch, roll and yaw channels. <strong>The</strong> altitude<br />
controller uses the same tuning parameters obtained from the pitch, roll and yaw<br />
controller experiment. <strong>The</strong> tuning parameters comparison is done for control penalty<br />
factor r w and prediction horizon length N p . <strong>The</strong> control penalty factor r w is determined<br />
first in the experiment and the best r w value is then used for the N p effect experiment.<br />
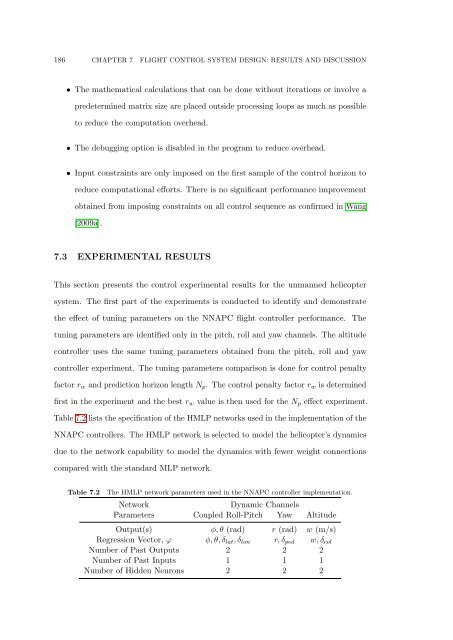
Table 7.2 lists the specification <strong>of</strong> the HMLP networks used in the implementation <strong>of</strong> the<br />
NNAPC controllers. <strong>The</strong> HMLP network is selected to model the helicopter’s dynamics<br />
due to the network capability to model the dynamics with fewer weight connections<br />
compared with the standard MLP network.<br />
Table 7.2<br />
<strong>The</strong> HMLP network parameters used in the NNAPC controller implementation.<br />
<strong>Network</strong><br />
Dynamic Channels<br />
Parameters Coupled Roll-Pitch Yaw Altitude<br />
Output(s) φ, θ (rad) r (rad) w (m/s)<br />
Regression Vector, ϕ φ, θ, δ lat , δ lon r, δ ped w, δ col<br />
Number <strong>of</strong> Past Outputs 2 2 2<br />
Number <strong>of</strong> Past Inputs 1 1 1<br />
Number <strong>of</strong> Hidden Neurons 2 2 2













